NovĂœ systĂ©m nestacionĂĄrnĂ perimetrickĂ© ochrany objektĆŻ
OtĂĄzka spolehlivosti a kvality bezpeÄnostnĂch systĂ©mĆŻ je v dneĆĄnĂ dobÄ primĂĄrnĂm kritĂ©riem pro vĂœbÄr konkrĂ©tnĂho typu zabezpeÄenĂ. NejrizikovÄjĆĄĂ jsou z tohoto pohledu perimetrickĂ© systĂ©my, kterĂ© prakticky ve vĆĄech svĂœch variantĂĄch a technologiĂch vĂœraznÄ podlĂ©hajĂ vlivu vnÄjĆĄĂch podmĂnek a ruĆĄivĂœch vlivĆŻ.
PoznĂĄmka redakce na Ășvod:
ÄlĂĄnek navrhuje novĂ© ĆeĆĄenĂ bezpilotnĂho prvku ochrany objektĆŻ, nicmĂ©nÄ recenzent se k navrhovanĂ©mu ĆeĆĄenĂ vyjĂĄdĆil spĂĆĄe kriticky, viz KomentĂĄĆ recenzenta.
1. SouÄasnĂœ stav perimetrickĂ© ochrany objektĆŻ
Prvky perimetrickĂœch systĂ©mĆŻ jsou detektory, kterĂ© signalizujĂ naruĆĄenĂ vnÄjĆĄĂch ÄĂĄstĂ stĆeĆŸenĂœch areĂĄlĆŻ u rĆŻznĂœch rozsĂĄhlĂœch objektĆŻ, komplexĆŻ budov a podobnÄ. Konstrukce detektorĆŻ pouĆŸĂvanĂœch v perimetrickĂ© ochranÄ, musĂ odolat klimatickĂœm podmĂnkĂĄm a vnÄjĆĄĂmu prostĆedĂ. DĂky tomu se odliĆĄuje od prvkĆŻ zabezpeÄovacĂch systĂ©mĆŻ, pouĆŸĂvanĂœch uvnitĆ objektĆŻ, kde je jasnÄ definovanĂ© prostĆedĂ a moĆŸnĂ© ruĆĄivĂ© vlivy.
U vÄtĆĄiny perimetrickĂœch systĂ©mĆŻ se vyuĆŸĂvĂĄ ostraha uzlovĂœch bodĆŻ, neprovĂĄdĂ se tedy zabezpeÄenĂ celĂ©ho venkovnĂho prostoru, ale pouze vytipovanĂœch prostor, u kterĂœch se pĆedpoklĂĄdĂĄ, ĆŸe je naruĆĄitel vyuĆŸije. SystĂ©my monitorujĂcĂ celou chrĂĄnÄnou plochu jsou pro obvyklĂ© komerÄnĂ zabezpeÄenĂ pomÄrnÄ drahĂ© a prakticky se nevyuĆŸĂvajĂ. SystĂ©mĆŻ pro perimetrickou ochranu je celĂĄ Ćada, mezi ty nejÄastÄji pouĆŸĂvanĂ© patĆĂ stĆeĆŸenĂ hranic pozemku, tedy plotu. V tomto pĆĂpadÄ se pouĆŸĂvajĂ infraÄervenĂ© zĂĄvory a bariĂ©ry, mikrovlnnĂ© bariĂ©ry, zemnĂ detekÄnĂ kabely a pĆedevĆĄĂm tenzometrickĂ© a indukÄnĂ plotovĂ© systĂ©my. V rĂĄmci zkvalitnÄnĂ ochrany se tyto zĂĄkladnĂ perimetrickĂ© systĂ©my kombinujĂ s dalĆĄĂmi fyzikĂĄlnĂmi principy zabezpeÄenĂ.
NavrĆŸenĂm systĂ©mu, kterĂœ by zefektivnil perimetrickou ochranu objektĆŻ, pĆedevĆĄĂm z hlediska dohledu nad celĂœm pozemkem, nebo alespoĆ jeho vÄtĆĄĂ ÄĂĄstĂ, mĆŻĆŸeme zĂĄroveĆ minimalizovat riziko hlĂĄĆĄenĂ faleĆĄnĂœch a planĂœch poplachĆŻ a zajistit vÄasnou reakci na vniknutĂ naruĆĄitele na pozemek, dĆĂve neĆŸ stihne napĂĄchat nÄjakou ĆĄkodu.
2. Nåvrh nového systému
NĂĄvrh a vĂœzkum nestacionĂĄrnĂho systĂ©mu perimetrickĂ© ochrany se tĂœkĂĄ analĂœzy stĂĄvajĂcĂch systĂ©mĆŻ pouĆŸĂvanĂœch ve vnÄjĆĄĂ ochranÄ objektĆŻ se zamÄĆenĂm pĆedevĆĄĂm na nĂĄvrh novĂ©ho prototypu zaĆĂzenĂ, kterĂ© minimalizuje nedostatky stĂĄvajĂcĂch systĂ©mĆŻ a zefektivnĂ tak jejich dohled nad pozemkem kolem zabezpeÄovanĂœch objektĆŻ.
ZabezpeÄenĂ rozsĂĄhlĂœch vnÄjĆĄĂch ploch je ĆeĆĄeno Äidly a detektory, kterĂœch je na trhu hned nÄkolik druhĆŻ od rĆŻznĂœch vĂœrobcĆŻ. StejnÄ jako ostatnĂ typy detektorĆŻ v zabezpeÄovanĂœch oblastech se neustĂĄle vyvĂjĂ. Pro zkvalitnÄnĂ ostrahy, snĂĆŸenĂ faleĆĄnĂœch i planĂœch poplachĆŻ a pro zvĂœĆĄenĂ komfortu osob provĂĄdÄjĂcĂ ostrahu se velice Äasto perimetrickĂ© systĂ©my kombinujĂ jak s obchĆŻzkovĂœmi systĂ©my, tak pĆedevĆĄĂm s kamerovĂœmi systĂ©my. BÄhem vĂœvoje novĂ©ho prototypu nestacionĂĄrnĂho zaĆĂzenĂ bylo hlavnĂm poĆŸadavkem komplexnĂ zajiĆĄtÄnĂ celĂ©ho pozemku s pĆihlĂ©dnutĂm k tomu, ĆŸe s bÄĆŸnÄ vyuĆŸĂvanĂœmi principy detektorĆŻ je prakticky nemoĆŸnĂ© hlĂdat celĂœ venkovnĂ prostor, napĆ. vzhledem k rozsĂĄhlosti pozemkĆŻ. Dnes bĂœvajĂ hlĂdĂĄny jen vytipovanĂ© rizikovĂ© oblasti a oplocenĂ pozemku (viz. vĂœĆĄe uzlovĂ© bezpeÄnostnĂ body objektu/pozemku). ZĂĄkladem navrhovanĂ©ho systĂ©mu byl tedy pĆedpoklad schopnosti kontroly nad kteroukoliv ÄĂĄstĂ pozemku, podle aktuĂĄlnĂ situace. ZĂĄroveĆ byl kladen dĆŻraz na jeho spolehlivost a finanÄnĂ dostupnost.
3. VĂœvoj kontrolnĂho systĂ©mu
Na poÄĂĄtku nĂĄvrhu musela bĂœt zvolena odpovĂdajĂcĂ technologie samotnĂ©ho zaĆĂzenĂ, tak aby odpovĂdala poĆŸadavkĆŻm systĂ©mu a jeho okolĂ. Vzhledem k rozsĂĄhlosti prostor, kterĂ© mĂĄ zaĆĂzenĂ monitorovat, byla nezbytnĂĄ rychlost pĆesunu zaĆĂzenĂ po pozemku a pĆesnost identifikace mĂsta, kterĂ© mĂĄ bĂœt pod dohledem (pomocĂ napĆ. GPS souĆadnic). NĂĄrokĆŻ kladenĂœch na zaĆĂzenĂ bylo samozĆejmÄ vĂce, pĆedevĆĄĂm spolehlivost, schopnost monitorovĂĄnĂ pozemku za rĆŻznĂœch klimatickĂœch podmĂnek i pĆenos obrazu snĂmanĂ©ho prostoru.
Z tÄchto dĆŻvodĆŻ byl navrĆŸen prototyp hexakoptĂ©ry, kterĂœ je dĂky svĂ©mu pohybu (letu v nĂzkĂœch a stĆednĂch vĂœĆĄkĂĄch) schopen jak rychlĂ©ho pĆesunu, tak dĂky kameĆe umĂstÄnĂ© ve spodnĂ ÄĂĄsti prototypu, monitorovĂĄnĂ vybranĂ© oblasti. PĆenos dat z kamery je zajiĆĄtÄn vyhrazenĂœm bezdrĂĄtovĂœm pĆenosem on-line na poÄĂtaÄ ostrahy a pro pĆĂpad ztrĂĄty signĂĄlu se uklĂĄdĂĄ i na internĂ pamÄĆ„ mobilnĂho zaĆĂzenĂ. NavrĆŸenĂĄ konstrukce je dĂky ĆĄesti vrtulĂm dostateÄnÄ stabilnĂ i za letu v nepĆĂznivĂ©m poÄasĂ, takĆŸe kvalita snĂmanĂ©ho obrazu je prakticky za vĆĄech testovanĂœch situacĂch velice dobrĂĄ. To spolu s vazbou na poÄĂtaÄovou mapu objektu (budovy, nadmoĆskĂĄ vĂœĆĄka, porost, komunikace) umoĆŸĆuje prostĆedku optimĂĄlnĂ pohyb k mĂstu poplachu a jeho rychlou, spolehlivou a pĆitom zcela nenĂĄpadnou kontrolu.
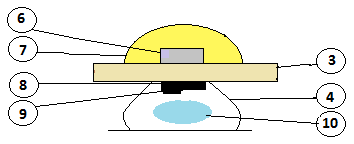
Obr: 1. – BoÄnĂ Ćez zĂĄkladnĂho tÄla
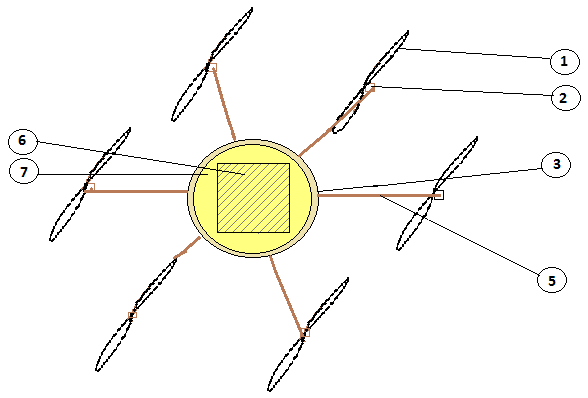
Obr: 2. – Pohled shora
TechnickĂ© ĆeĆĄenĂ znĂĄzornÄnĂ© na obr. 1. a obr. 2. spoÄĂvĂĄ ve vytvoĆenĂ prototypu v podobÄ hexakoptĂ©ry, kterĂœ slouĆŸĂ jako doplĆujĂcĂ systĂ©m pro zvĂœĆĄenĂ efektivity perimetrickĂ© ochrany objektĆŻ. Prototyp se sklĂĄdĂĄ ze samotnĂ© zĂĄkladnĂ desky 3 a hlavnĂ konstrukce 5, na kterĂœch jsou umĂstÄny dĂlÄĂ komponenty. ZĂĄkladnĂm prvkem je ve vrchnĂ ÄĂĄsti umĂstÄnĂĄ ĆĂdĂcĂ elektronika 6 ovlĂĄdajĂcĂ celĂœ systĂ©m, kterĂĄ je chrĂĄnÄnĂĄ krytem 7 pĆed klimatickĂœmi podmĂnkami. Ve spodnĂ ÄĂĄsti je uprostĆed podvozku 4 prostor pro zavÄĆĄenou kameru 10, kterĂĄ bÄhem letu snĂmĂĄ poĆŸadovanĂœ prostor. Na spodnĂ ÄĂĄsti zĂĄkladnĂ desky 3 je umĂstÄn akumulĂĄtor pro pohyb prototypu 8 a akumulĂĄtor 9 pro Äinnost umĂstÄnĂ© kamery a dalĆĄĂch palubnĂch systĂ©mĆŻ (aktivnĂ vĂœĆĄkomÄr, umÄlĂœ horizont, GPS pĆijĂmaÄ, prostĆedky komunikace a prostĆedky pasivnĂ ochrany prototypu). Pro samotnĂœ pohyb prototypu slouĆŸĂ 6 vrtulĂ 1 pohĂĄnÄnĂœch vlastnĂmi rotory 2, kterĂ© pĆi zapnutĂ systĂ©mu spustĂ kontrolu vrtulĂ 1 a dĂky akumulĂĄtoru 8 umoĆŸnĂ prototypu let a plnÄnĂ poĆŸadovanĂœch funkcĂ.
4. MoĆŸnosti systĂ©mu

Obr: 3. – PĆĂprava pĆed startem
Prototyp hexakoptĂ©ru je momentĂĄlnÄ na poÄĂĄtku testovĂĄnĂ (obr. 3). PrvnĂ etapu testĆŻ – konfigurace optimĂĄlnĂho nastavenĂ palubnĂch pĆĂstrojĆŻ prototyp jiĆŸ ĂșspÄĆĄnÄ absolvoval, stejnÄ tak jako druhou ÄĂĄst, kterou bylo optimalizace ĆĂdĂcĂch povelĆŻ pĆedevĆĄĂm ve vztahu k vĂœĆĄkomÄru a GSM systĂ©mu. Stabilizace vĂœĆĄky umoĆŸĆuje pĆĂstroji nastavenĂ vĂœĆĄky nad ĂșrovnĂ porostu a dalĆĄĂch pĆekĂĄĆŸek na pozemku, ve kterĂ© se pak pĆĂstroj automaticky pohybuje. BÄhem testovĂĄnĂ bylo ovÄĆeno, ĆŸe odchylky od pĆedpoklĂĄdanĂ© vĂœĆĄky jsou minimĂĄlnĂ (v ĆĂĄdech nÄkolika centimetrĆŻ).
DalĆĄĂ testovanou funkcĂ je stabilizace dle GPS, kterĂĄ umoĆŸnĂ pĆĂstroji v podstatÄ stĂĄnĂ ve vzduchu na programem definovanĂ©m mĂstÄ. Po mÄĆenĂ bylo zjiĆĄtÄno, ĆŸe odchylky jsou opÄt v ĆĂĄdech nÄkolika centimetrĆŻ (i kdyĆŸ v tomto pĆĂpadÄ musela bĂœt upravena metodika vyhodnocovĂĄnĂ, samotnĂœ GSM systĂ©m je v tomto pĆĂpadÄ nedostateÄnÄ pĆesnĂœ a musela bĂœt vyuĆŸita dalĆĄĂ upĆesĆujĂcĂ zĂĄkladna). PoslednĂ dosud testovanou funkcĂ byl tzv. nĂĄvrat domĆŻ, kterĂœ zajiĆĄĆ„uje modulu v pĆĂpadÄ ztrĂĄty ĆĂdĂcĂho signĂĄlu (povelu z ĆĂdĂcĂho centra Äi ztrĂĄta GSM souĆadnic) bezpeÄnĂœ nĂĄvrat do pĆedem definovanĂ©ho bodu. PĆi pouĆŸitĂ tĂ©to funkce se prototyp vracĂ na mĂsto, odkud vzlĂ©tl (resp. na definovanou souĆadnici). ProzatĂm byla tato funkce testovĂĄna na vzdĂĄlenost nÄkolika stovek metrĆŻ s pĆesnostĂ na nÄkolik centimetrĆŻ. Bude vĆĄak potĆeba podrobnÄji analyzovat situaci pĆi ztrĂĄtÄ dosahu GSM, zde pĆi nĂĄvratu dochĂĄzĂ k rozdĂlu aĆŸ v ĆĂĄdovÄ metrech pĆi vzdĂĄlenostech od bodu ztrĂĄty signĂĄlu ĆĂĄdovÄ stovek metrĆŻ.
V souÄasnĂ© dobÄ probĂhajĂ pĆedevĆĄĂm letovĂ© zkouĆĄky, kdy se testujĂ rĆŻznĂ© palubnĂ pĆĂstroje (kamery, systĂ©my pasivnĂ ochrany, zdroje energie) a jejich vliv na letovĂ© vlastnosti modulu. PĆedpoklĂĄdĂĄme jejich ukonÄenĂ v prĆŻbÄhu zĂĄĆĂ tohoto roku, pak budou nĂĄsledovat finĂĄlnĂ testy a Ășpravy programovĂœch modulĆŻ, pĆedevĆĄĂm kritickĂœ se jevĂ automatickĂœ nĂĄvrat do tzv. dokovacĂ stanice, kde dochĂĄzĂ k automatickĂ©mu dobĂjenĂ modulu.
SoubÄĆŸnÄ s tĂmto testovĂĄnĂm se provĂĄdÄjĂ nezbytnĂ© Ășkony smÄĆujĂcĂ ke splnÄnĂ pĆedpisĆŻ L2 o letectvĂ a zaregistrovĂĄnĂ prototypu a pilota. PotĂ© probÄhne finĂĄlnĂ testovĂĄnĂ v pĆĂsluĆĄnĂœch prostorech, kterĂ© nebudou v rozporu s uvedenĂœmi pĆedpisy.
PoslednĂ, nejdĆŻleĆŸitÄjĆĄĂ ÄĂĄstĂ testĆŻ bude ovÄĆenĂ plnĂ© automatizace propojenĂ perimetrickĂ©ho systĂ©mu, kterĂĄ systĂ©mu pĆedĂĄ informaci o mĂstÄ poplachu, automatickĂœ start modulu a jeho pĆelet na uvedenou souĆadnici, detekce a ovÄĆenĂ pĆĂpadnĂ©ho naruĆĄenĂ vÄetnÄ pĆenosu on-line obrazu na pracoviĆĄtÄ ostrahy, rozhodnutĂ o zpĆŻsobu nĂĄvratu modulu (nĂĄvrat do mĂsta startu, alternativnÄ kontrola blĂzkĂœch bezpeÄnostnĂch bodĆŻ), automatizovanĂœ nĂĄvrat a pĆistĂĄnĂ do dokovacĂ stanice a pĆesun obrazovĂœch a video dat zĂskanĂœch za letu na externĂ disk pro jeho archivaci a pĆĂpadnÄ zpÄtnĂ© vyhodnocenĂ. VyhodnocovacĂ systĂ©m pak automaticky navrhne stornovĂĄnĂ poplachu Äi jeho potvrzenĂ a realizaci dalĆĄĂch postupĆŻ.
5. ZĂĄvÄr
PĆĂnosem tohoto projektu je vytvoĆenĂ funkÄnĂho prototypu zaĆĂzenĂ urÄenĂ©ho k zajiĆĄtÄnĂ efektivnÄjĆĄĂho dohledu nad perimetrickou ochranou objektĆŻ. HexakoptĂ©ra bude slouĆŸit jako automatizovanĂĄ vizuĂĄlnĂ kontrolnĂ jednotka vĂĄzanĂĄ na bezpeÄnostnĂ systĂ©m, tedy neslouĆŸĂ jako samostatnĂœ bezpeÄnostnĂ prvek, ale jako kontrolnĂ prvek, respektive kontrolnĂ systĂ©m. HlavnĂ funkcĂ tohoto ĆeĆĄenĂ je zjiĆĄtÄnĂ, z jakĂ©ho dĆŻvodu byl poplach vyvolĂĄn, jednĂĄ-li se o neoprĂĄvnÄnĂ© vniknutĂ na pozemek nebo o planĂœ poplach (tedy poplach, kterĂœ nevznikl detekcĂ naruĆĄitele objektu Äi zmÄnou jinĂ© sledovanĂ© hodnoty).
CelkovĂ© ĆeĆĄenĂ tohoto kontrolnĂho systĂ©mu je vĂœhodnĂ© z nÄkolika dĆŻvodĆŻ, kromÄ vizuĂĄlnĂ kontroly, urÄenĂ© k zjiĆĄtÄnĂ dĆŻvodu vzniku poplachu a schopnosti kontroly nad celĂœm rozsĂĄhlĂœm pozemkem, z hlediska zvĂœĆĄenĂ efektivnosti a bezpeÄnosti celĂ©ho systĂ©mu.
Na tento projekt byly poskytnuty finanÄnĂ granty z InternĂ grantovĂ© agentury TechnickĂ© fakulty ÄZU v Praze ÄĂslo 31170/1312/3115 a 31170/1312/3118, dĂky tÄmto financĂm bylo moĆŸno prototyp sestrojit a nynĂ je ve fĂĄzi testovĂĄnĂ.
KomentĂĄĆ recenzenta
Jak je v ÄlĂĄnku sprĂĄvnÄ uvedeno, stacionĂĄrnĂ perimetrickĂĄ ochrana nenĂ spolehlivĂĄ a vykazuje velkou mĂru faleĆĄnĂœch detekcĂ. Z tohoto dĆŻvodu se nejÄastÄji kombinuje s doplĆkovĂœmi prvky, jejich ĂșÄelem je pĆedevĆĄĂm verifikace, tyto doplĆkovĂ© prvky mnohdy samy o sobÄ majĂ detekÄnĂ vlastnosti.
Jako typickĂ©ho zĂĄstupce lze jmenovat kamerovĂ© systĂ©my s detekcĂ pohybu v obraze a moĆŸnostĂ nastavenĂ tzv. elektronickĂœch plotĆŻ, pĆĂpadnÄ infraÄervenĂ© kamery s detekcĂ pohybu a laserovĂ© skenery. JednĂĄ se o modernĂ velmi drahĂ© systĂ©my, urÄenĂ© pĆedevĆĄĂm pro velkĂ© perimetry a ochranu vyĆĄĆĄĂch hodnot napĆĂklad tzv. kritickĂ© infrastruktury.
NavrĆŸenĂœ princip bude vyĆŸadovat pomÄrnÄ velikou zruÄnost operĂĄtora a zcela urÄitÄ nebude lacinĂœ. Jeho pouĆŸitĂ bude velmi limitovĂĄno nejen charakterem hlĂdanĂ©ho perimetru a plochy, ale pĆedevĆĄĂm klimatickĂœmi podmĂnkami. SebelepĆĄĂ stabilizace a inerciĂĄlnĂ systĂ©my ĆĂzenĂ si nedokĂĄĆŸĂ poradit se silnĂœm vÄtrem.
Na takovĂ© manĂ©vry nebude mĂt uvedenĂœ stroj dostatek energie. Pro noÄnĂ ostrahu bude navĂc vyĆŸadovat silnĂ© IR pĆisvĂcenĂ a ve spojenĂ se samotnou megapixelovou kamerou a radiovĂœm pĆenosem bude klĂĄst velkĂ© nĂĄroky na baterii.
Z toho je patrnĂ©, ĆŸe jeho operaÄnĂ vyuĆŸitĂ bude pomÄrnÄ krĂĄtkĂ© a v zĂĄloze budou muset bĂœt minimĂĄlnÄ jeden aĆŸ dva dalĆĄĂ prostĆedky.
Tento princip je moĆŸnĂ© pouĆŸĂt pouze na vizuĂĄlnĂ kontrolu, nikoliv na detekci pohybu a uĆŸ vĆŻbec ne na detekci pohybu v obraze. V samotnĂ©m ÄlĂĄnku je navĂc uvedena kombinace principĆŻ GPS a GSM. GPS je pro inerciĂĄlnĂ navigaci vhodnĂœ, nelze vĆĄak poÄĂtat se zachovĂĄnĂm potĆebnĂ© pĆesnosti za vĆĄech okolnostĂ a uĆŸ vĆŻbec nelze poÄĂtat s pĆesnostĂ vĂœĆĄkovou. Pro tento ĂșÄel je nutnĂ© mĂt k dispozici vĂœĆĄkomÄry a detektory blĂzkĂœch pĆekĂĄĆŸek (antikoliznĂ systĂ©m) zaloĆŸenĂ© na zcela odliĆĄnĂœch principech. V ÄlĂĄnku uvedenĂ© pouĆŸitĂ technologie GSM je pro tento ĂșÄel vĂce neĆŸ diskutabilnĂ.
Z mĂ©ho pohledu je navrhovanĂœ princip vyuĆŸitĂ bezpilotnĂho prostĆedku tak trochu naivnĂ. Pro znalce problematiky perimetrickĂ© ochrany velkĂœch celkĆŻ a dostupnĂ© personĂĄlnĂ kvality sluĆŸby ostrahy zĆŻstane uvedenĂœ nĂĄvrh asi jeĆĄtÄ dlouho v oblasti utopie.

V relaci UdĂĄlosti 5.6.2013 bylo vidÄt uĆŸitĂ podobnĂ©ho principu pro zcela jinĂ© ĂșÄely. (od 37:11 min.)
Jan Petr, student informatiky, pouĆŸil pro sledovĂĄnĂ povodnĂ quadrokoptĂ©ru s malou sportovnĂ kamerou.
ZatĂmco vrtulnĂk vydrĆŸĂ ve vzduchu 3 hodiny, quadrokoptĂ©ra vydrĆŸĂ na jednu baterii jen 10 minut, ale dostane se tam, kam se pilotovanĂœ stroj nedostane, napĆĂklad nad areĂĄl chemiÄky.
NenĂ zcela bÄĆŸnĂ© poslat stroj za desĂtky tisĂc nad vodnĂ hladinu, ale podle autora J. Petra je nynĂ dĆŻleĆŸitĂĄ pomoc a lidskĂ© osudy. Podle slov spoluobÄanĆŻ postiĆŸenĂœch povodnÄmi, jejichĆŸ nemovistosti natĂĄÄel, by tak mohla snĂĄze pĆijĂt pomoc.
Zdroj: UdĂĄlosti ÄT
The question of reliability and at the same time quality of security systems is the most important criterion for selecting a particular type of security. The most dangerous from this point of view are perimeter systems that virtually in all modifications and technologies are greatly subject to the influence of external conditions and distractions. Due to this fact many false alarms quite often prevents their actual use (at least in civilian areas). This is why we (in the Laboratory of security systems Faculty of Engineering CZU) were searching for a way how to increase the efficiency of employment of the discussed perimeter systems. We wanted to enable problem-free utilization in the commercial area at a moderate price if possible. The solving of the problem by way of minimizing false alarms failed when changed to a different physical principle of detectors. Therefore we chose a different approach – we made a perimeter system with movable and automatic alarm verification.