Diagnostika stavebnû§ch objektov metû°dou mobilnûˋho 3D skenovania
PrûÙspevok je orientovanû§ na zhodnotenie moéƒnostûÙ vyuéƒitia diagnostiky stavebnû§ch objektov a vû§stupov procesu mobilnûˋho 3D skenovania existujû¤cich objektov a ich û¤pravy prostrednûÙctvom softvûˋrovej transformûÀcie do prostredia BIM (Building Information Modeling). DûÇraz je kladenû§ na problematiku vytvûÀrania informaánûˋho modelu stavebnûˋho objektu na zûÀklade point cloudu uráenûˋho mobilnû§m 3D mapovanûÙm. Hlavnû§m cieáƒom bolo spracovanie nameranû§ch dûÀt mobilnûˋho mapovania, realizûÀcia û¤konov importu tû§chto dûÀt do programovûˋho prostredia Autodesk Revit a vytvorenie BIM modelu. Pridruéƒenû§m cieáƒom bolo porovnanie vû§slednûˋho objektu pochûÀdzajû¤ceho z point cloudu s existujû¤cou projektovou dokumentûÀciou. Zhodnotenie celûˋho procesu prostrednûÙctvom SWOT analû§zy predstavuje zûÀver prûÙspevku.

© Fotolia.com
álûÀnek byl ocenán a vydûÀn v rûÀmci 21. roánûÙku odbornûˋ konference doktorskûˋho studia Juniorstav.
1 ûvod
Priemysel, ako aj celûˋ éƒivotnûˋ prostredie áloveka je do citeáƒnej miery poznaáenûˋ integrûÀciou modernû§ch a inovatûÙvnych technolû°giûÙ, priáom stavebnûÙctvo ako vû§znamnûÀ sû¤áaséË hospodûÀrstva rozvûÙjajû¤cich sa krajûÙn Eû, nemûÇéƒe byéË vû§nimkou. NajmûÊ z titulu znaánej miery senzitivity, ktorû¤ bolo moéƒnûˋ zachytiéË v krûÙzovom obdobûÙ, je nutnûˋ si uvedomiéË skutoánoséË, éƒe budû¤cimi faktormi éƒiaducej miery konkurencieschopnosti odvetvia je nûÀvrh a zavûÀdzanie nûÀstrojov, ktorûˋ v sebe integrujû¤ kroky systematickûˋho manaéƒûˋrskeho riadenia, prihliadania na efektûÙvne ekonomickûˋ prûÙstupy a v neposlednom rade integrûÀciu pokroáilû§ch technickû§ch a technologickû§ch procesov. Do tejto skupiny procesov je moéƒnûˋ zaradiéË napr. zavûÀdzanie metû°d spracovania investûÙcie (realizûÀcie stavebnej zûÀkazky) prepûÀjajû¤cich vyuéƒitie pokroáilej technolû°gie zûÙskavania nevyhnutnû§ch iniciaánû§ch û¤dajov (dûÀtovû§ch vstupov) formou 3D laserovûˋho skenovania jestvujû¤ceho stavu objektov a pokroáilûˋ softvûˋrovûˋ rieéÀenia z prostredia BIM (Building Information Modeling) ako nûÀstroja pre spracovanie takto zûÙskanej dokumentûÀcie.
AplikûÀcia danûˋho postupu predstavuje vû§chodisko pre nûÀslednûˋ a prûÙbuznûˋ aktivity spojenûˋ s realizûÀciou nevyhnutnû§ch áastûÙ stavebnûˋho investiánûˋho zûÀmeru, akû§mi sû¤ napr. projekcia, ocenenie stavebnej zûÀkazky alebo tzv. „Facility management“.
Na tomto mieste je vhodnûˋ uvieséË, éƒe aplikûÀcia 2D a 3D laserovûˋho skenovania bola a stûÀle je veáƒmi populûÀrna v geografickû§ch a geodetickû§ch áinnostiach, avéÀak v prepojenûÙ s BIM nûÀstrojmi dostûÀva tûÀto technolû°gia v prostredûÙ stavebnûÙctva novû§ rozmer a vû§znam. Jednû§m z vû§znamnû§ch dûÇvodov preáo presadzovaéË BIM systûˋmy vo svete je aj snaha o redukciu nûÀkladov spojenû§ch s realizûÀciou stavebnû§ch projektov. V spoluprûÀci s aktivitami spoáûÙvajû¤cimi v digitûÀlnom spracovanûÙ dûÀt umoéƒéuje rû§chlu manipulûÀciu s informûÀciami, eliminuje rizikûÀ spojenûˋ s moéƒnoséËami vzniku chû§b spûÇsobenû§ch naprûÙklad zlû§m zûÀpisom, nûÀártom alebo nepravdivou interpretûÀciou zûÀpisu v rûÀmci spoluprûÀce medzi vykonûÀvateáƒom meranûÙ in situ a spracovateáƒom 3D modelu.
2 Diagnostika stavebnû§ch objektov
VyuéƒûÙvanie kompletnû§ch û¤dajov zûÙskanû§ch pomocou nedeéÀtruktûÙvnej diagnostiky je hlavnû§m zdrojom vstupnû§ch informûÀciûÙ pre analû§zu stavu stavebnû§ch objektov, vyhodnotenie a váasnûˋ nûÀvrhy opatrenûÙ, ktorûˋ zabezpeáia dodréƒanie alebo predá¤éƒenie éƒivotnosti stavebnû§ch objektov. Spracovanûˋ vû§sledky sû¤ vhodnû§m zûÀkladom pre plûÀnovanie a efektûÙvne rozmiestnenie prostriedkov – vznikûÀ sû¤visloséË medzi disponibilnû§mi prostriedkami (û¤dréƒba, opravy) a kvalitou danû§ch objektov. Zavedenie zberu û¤dajov pomocou nedeéÀtruktûÙvnej diagnostiky vedie k celkovej objektivizûÀciûÙ v rozdeáƒovanûÙ prostriedkov zûÀroveé ovplyvéuje kvalitu stavebnû§ch objektov.
Mobilnû§ 3D skenovanie – mobilnû§ mapovacûÙ systûˋm MMS
Laserovûˋ skenovanie je v sû¤áasnej dobe najmodernejéÀia a bezkonkurenáne najefektûÙvnejéÀia metû°da diagnostiky a hromadnûˋho zberu presnû§ch priestorovû§ch dûÀt. Veáƒkou vû§hodou je zameranie obrovskûˋho mnoéƒstva bodov za krûÀtky áas a moéƒnoséË merania aj v éËaéƒko prûÙstupnû§ch priestoroch. Laserovû§ skener vyuéƒûÙva pulzovû¤ laserovû¤ technolû°giu. Vû§stupom je mraáno bodov – stovky miliû°nov bodov s priestorovû§mi sû¤radnicami. Ku kaéƒdûˋmu bodu mûÇéƒu byéË priradenûˋ aj informûÀcie o farbe a intenzite. Takouto metû°dou zûÙskanûˋ virtuûÀlne modely vykazujû¤ minimûÀlnu stratu informûÀciûÙ o svojich rozmeroch a tvaroch. [1] [2]
Mobilnû§ mapovacûÙ systûˋm (MMS) je vo svojej podstate nedeéÀtruktûÙvna diagnostika, ktorûÀ umoéƒéuje bezkontaktnûˋ uráenie priestorovû§ch sû¤radnûÙc bodov, prostrednûÙctvom senzorov a prûÙsluéÀnûˋho vyhodnocovacieho softvûˋru, ktorûˋ sû¤ sû¤áaséËou vozidla Lynx SG1. Mobilnû§ laserovû§ skener je schopnû§ zhromaéƒdiéË obrovskûˋ mnoéƒstvo bodov aéƒ 1,26 bodov/sekunda (tzv. mraáno bodov, resp. point cloud Obr. 1 vpravo) s minimûÀlnym rozstupom vo veáƒmi krûÀtkom áase. ProstrednûÙctvom kamery sû¤ poáas skenovania zûÙskanûˋ tieéƒ digitûÀlne fotografie, na zûÀklade ktorû§ch je moéƒnûˋ jednotlivû§m bodom priradiéË ich reûÀlnu farbu. Vû§stupom skenovania teda mûÇéƒe byéË mraáno bodov s vysokou hustotou, alebo 3D model v reûÀlnych farbûÀch umiestnenû§ v poéƒadovanom sû¤radnicovom systûˋme. [3]
Mobilnûˋ skenovanie alebo inû§mi slovami – mobilnûˋ mapovanie véÀeobecne spoáûÙva v zhromaéƒáovanûÙ û¤dajov pomocou mobilnûˋho mapovacieho zariadenia, spracovanûÙ nameranû§ch û¤dajov (tzv. post-processing) a nûÀslednom spracovanûÙ mraána bodov (tzv. point cloud processing). Pre zhromaéƒáovanie û¤dajov v terûˋne kombinuje mobilnûˋ mapovacie zariadenie viacero technolû°giûÙ naraz (zariadenie LiDAR, globûÀlny navigaánû§ satelitnû§ systûˋm, inerciûÀlne meracie jednotky a jednotku merania vzdialenosti).
Vû§sledkom diagnostiky a zberu dûÀt v terûˋne prostrednûÙctvom mobilnûˋho mapovacieho systûˋmu sû¤ teda û¤daje z GNSS antûˋn namontovanû§ch na vozidle, observaánûˋ û¤daje zo zûÀkladnej (statickej) stanice GNSS, dûÀta z jednotiek IMU a DMI, taktieéƒ û¤daje z fotografiûÙ zûÙskanû§ch prostrednûÙctvom digitûÀlnych kamier a mraáno bodov. VéÀetky tieto dûÀta slû¤éƒia ako vstupnûˋ û¤daje pre nûÀslednûˋ spracovanie tzv. post-processing. Pod pojmom post-processing mûÀme na mysli áaléÀie spracovanie a zdokonalenie nameranû§ch û¤dajov. Vû§sledkom je mraáno bodov (point cloud – Obr. 1 vpravo) umiestnenûˋ vo vybranom sû¤radnicovom systûˋme, ktorûˋ mûÀ informûÀcie o farbe, polohe, vû§éÀke a intenzite kaéƒdûˋho bodu. NûÀslednûˋ spracovanie zahééa klasifikûÀciu mraána bodov podáƒa zvolenû§ch kritûˋriûÙ (napr. intenzita odrazu, farba bodov, nadmorskûÀ vû§éÀka). Je to dûÇleéƒitû§ proces, pri ktorom je moéƒnûˋ pouéƒitûÙm vhodnû§ch nûÀstrojov oddeliéË jednotlivûˋ prvky v mapovanej oblasti (vegetûÀcie, stromy, budovy, elektrickûˋ vedenia a pod.). V zûÀvislosti od poéƒadovanû§ch vû§sledkov z mobilnûˋho mapovania je moéƒnûˋ nûÀsledne vektorizovaéË mraáno bodov (napr. terûˋnne okraje, budovy) pomocou modelovania jednotlivû§ch objektov alebo vykonaéË analû§zy v aplikûÀciûÀch GIS. [3] [4]
3 Diagnostika 3D mobilnû§m skenovacûÙm systûˋmom
Pred samotnû§m zaáatûÙm mapovania bolo nutnûˋ sa uistiéË, éƒe prognû°za poáasia predpovedûÀ dobrûˋ jazdnûˋ vlastnosti a atmosfûˋrickûˋ podmienky pre meranie, ktorûˋ zahééajû¤ naprûÙklad teplotu ovzduéÀia v rozmedzûÙ −10 ̊C aéƒ +40 ̊C, véÀak v prûÙpade ak sû¤ kamery vypnutûˋ mûÇéƒe Lynx pracovaéË aj pri teplotûÀch −20 ̊C, minimûÀlne mnoéƒstvo zrûÀéƒok (dûÀéƒá, krû¤py, sneh, hmla) a takisto vhodnûˋ atmosfûˋrickûˋ podmienky bez zneáistenia oparom, dymom a pod. Pri mapovanûÙ bol vyuéƒûÙvanû§ skener mobilnû§ – Obr. 1 váƒavo (a z toho dûÇvodu bolo nutnûˋ vykonaéË obhliadku budovy, aby bol zabezpeáenû§ voáƒnû§ a plynulû§ prechod automobilu okolo celûˋho stavebnûˋho objektu.

Obr. 1 Mobilnû§ skener poáas merania HospodûÀrskeho bloku é§U (váƒavo), point cloud objektu (vpravo)
Pred vykonanûÙm samotnej diagnostiky je potrebnûˋ ponechaéË mobilnû§ skener zameraéË svoju polohu 5 minû¤t staticky (stojace vozidlo) a 5 minû¤t dynamicky (dynamickûÀ jazda s vozidlom), áûÙm sa zamerajû¤ na zûÀklade GPS (Global Positioning System), POS (Position Orientation System) a IMU (Inertial measurement unit) presnûˋ geografickûˋ û¤daje o polohe. [2] [4]

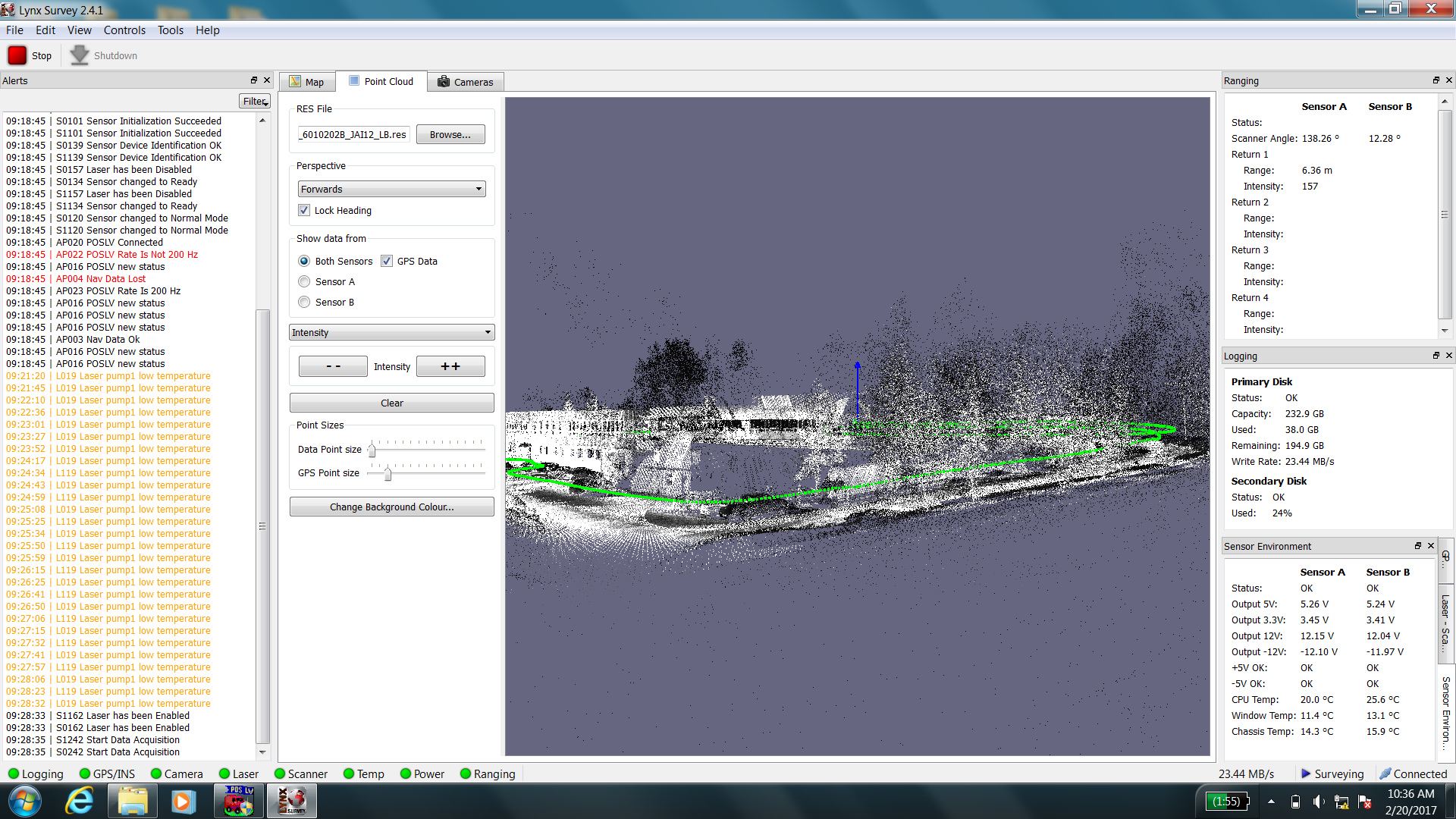
Obr. 2 Sledovanie zberu dûÀt (váƒavo), aktuûÀlne zobrazenia nameranû§ch dûÀt (vpravo) poáas jazdy vozidlom
Pri jazde s vozidlom Lynx a poáas zberu dûÀt je nutnûˋ sledovaéË systûˋm pre maximalizûÀciu kvality (Obr. 2). MonitorovanûÙm systûˋmu poáas prieskumu je moéƒnûˋ predûÙséË zlyhaniu systûˋmu, strate dûÀt, prûÙpadne zlepéÀiéË zber a presnoséË dûÀt. Po ukonáenûÙ jazdy diagnostickû§m vozidlom je nutnûˋ ponechaéË prûÙstroje zbieraéË dûÀta eéÀte 10 minû¤t staticky na mieste, kde nie sû¤ prekûÀéƒky k oblohe pre lepéÀiu koordinûÀciu lokalizaánû§ch systûˋmov.
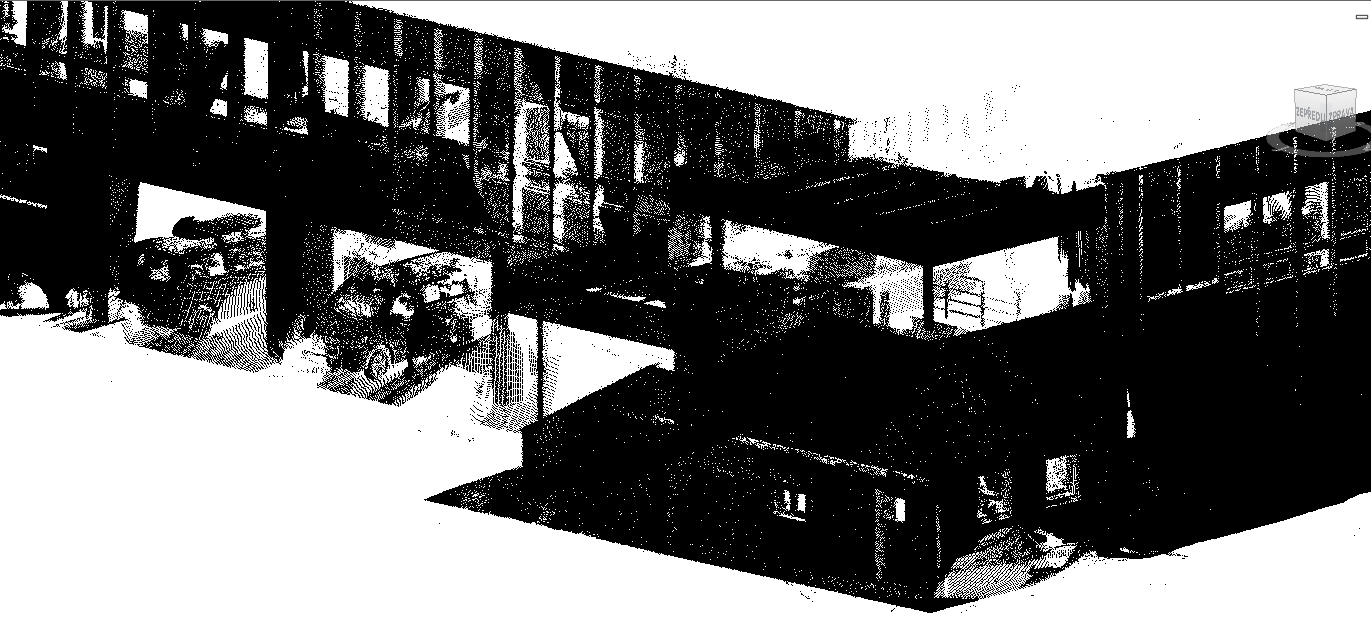
Obr. 3 Porovnanie neorezanûˋho a orezanûˋho mraána bodov
Post-processing point cloudu (Obr. 3), zabezpeáuje zdokonalenie nameranû§ch dûÀt. OdstrûÀni sa niekoáƒko miliû°nov bodov a tû§m sa mraáno bodov stûÀva preháƒadnejéÀie pre nûÀslednûˋ modelovanie a zûÀroveé mûÀ sû¤bor aj menéÀiu veáƒkoséË, áo sa prejavûÙ pri modelovanûÙ v programe jeho rû§chlejéÀou odozvou na prûÙkazy, ktorûˋ sû¤ programu zadûÀvanûˋ. Nasledoval proces modelovania stavebnûˋho objektu v softvûˋrovom prostredûÙ Autodesk Revit. [5] BIM modelovanie je praktickûˋ pre celkovû¤ vû§stavbu a uáƒaháuje monitoring problematickû§ch áastûÙ stavby v áase prevûÀdzky. NapomûÀha sprûÀvcom stavebnû§ch objektov zostavovaéË finanánû§ plûÀn z háƒadiska budû¤cich vû§davkov na opravy a tû§m lepéÀie plûÀnovaéË celkovû¤ sprûÀvu objektov. Je to dûÇleéƒitû§ nûÀstroj pre tzv. Life cycle assessment, kde mûÇéƒe byéË nûÀpomocnû§ pri optimalizûÀciûÙ éƒivotnûˋho cyklu objektu pri matematickom analytickom rieéÀenûÙ v kombinûÀciûÙ s experimentûÀlnym overenûÙm fyzikûÀlnych, mechanickû§ch a û¤navovû§ch charakteristûÙk. [6] Vû§robcovia stavebnû§ch prvkov alebo technologickû§ch zariadenûÙ rieéÀia otûÀzku, ái, kedy a akû§m spûÇsobom nastû¤piéË do BIM. V prûÙpade vû§robcov to obvykle znamenûÀ poskytnû¤éË portfû°lio svojich vû§robkov stavebnû§m projektantom vo forme 3D modelov s pridruéƒenû§mi informûÀciami. VznikûÀ konkurenánûÀ vû§hoda v zmysle, éƒe éÀanca zapracovania prûÀve ich produkt bude v stavebnom projekte je vyéÀéÀia, pretoéƒe projektant dostane hotovû§ model, ktorû§ mûÇéƒe do projektu jednoducho vloéƒiéË namiesto toho, aby sa obéËaéƒoval s jeho vytvûÀranûÙm. [7]
Skenovanie je potom vhodnûˋ vyuéƒiéË pri dokumentovanûÙ nepravidelnû§ch objektov ako sû¤ sochy reliûˋfy, archeologickûˋ nûÀlezy pretoéƒe zachytûÀva celû§ objekt s zvolenou mierou detailov. Z uvedenû§ch éÀtû¤diûÙ bolo zistenûˋ, éƒe fotogrametria a skenovanie sû¤ metû°dy, ktorûˋ na seba skûÇr nadvûÊzujû¤ a ich kombinûÀcia mûÇéƒe vyrieéÀiéË mnoéƒstvo problûˋmov, ktorûˋ sa pri pouéƒitûÙ technolû°giûÙ jednotlivo vyrieéÀiéË nedajû¤. [8]
NûÀsledne sa vyuéƒili nameranûˋ dûÀta a zrealizovalo sa porovnanie naskenovanû§ch û¤dajov (skutoánûˋho stavu) s reûÀlnou dokumentûÀciou. Vû§sledkom bolo zistenie nedokonalostûÙ v projektovej dokumentûÀciûÙ, ktorûˋ uvûÀdzam v nasledujû¤com Obr. 4:
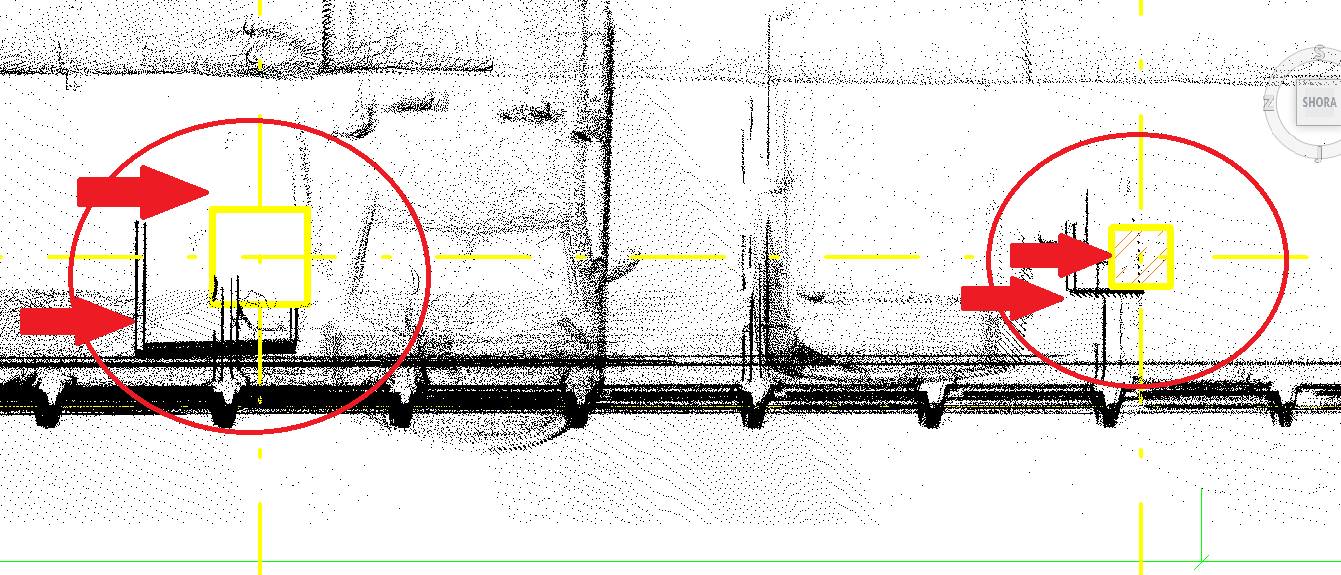
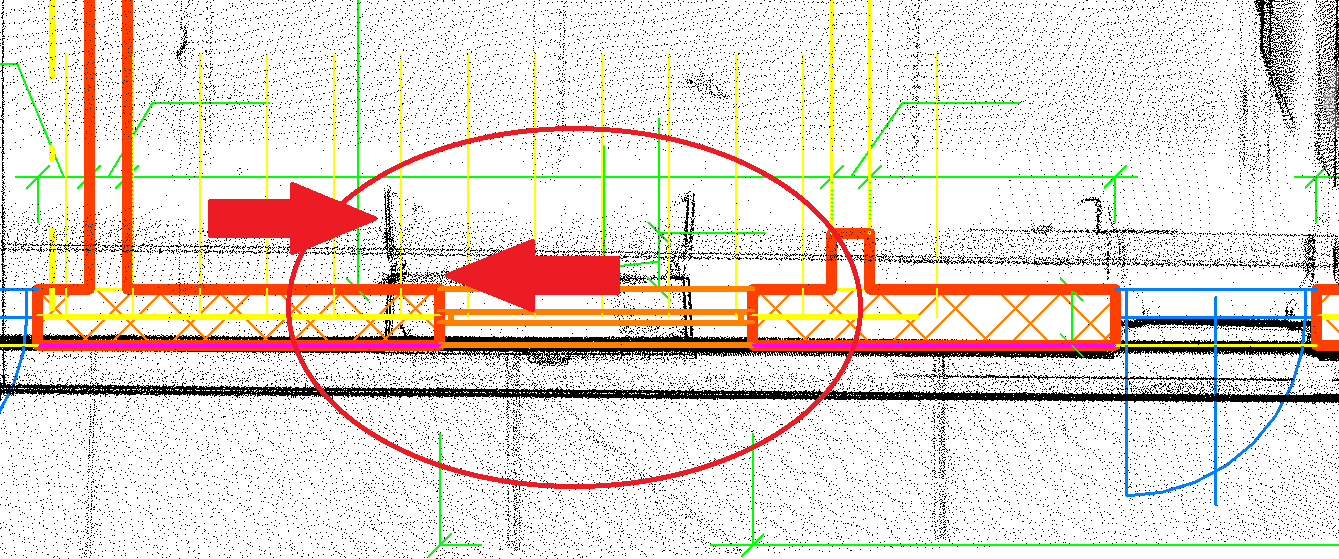
Obr. 4 Porovnanie point cloudu s projektovou dokumentûÀciou – stá¤py (váƒavo), okno (vpravo)
Z uvedenû§ch prûÙkladov je zjavnûˋ, éƒe porovnanie projektovej dokumentûÀcie a point cloudu mûÀ veáƒkûˋ uplatnenie. NaprûÙklad pri kolaudûÀciûÙ alebo kontrole kvality v rûÀmci kontrolnûˋho stavebnûˋho merania, kde je moéƒnûˋ rû§chlo a jednoducho zistiéË nezrovnalosti, ktorûˋ vznikli poáas vû§stavby medzi skutoánû§m stavom stavby a vû§kresovou dokumentûÀciou. V nasledujû¤cej kapitole sa autor venuje kompletizovaniu vnû¤tornû§ch silnû§ch a slabû§ch strûÀnok a vonkajéÀûÙch prûÙleéƒitostûÙ a hrozieb predstavenej problematiky a to prostrednûÙctvom SWOT analû§zy, ktorûÀ je vyuéƒûÙvanûÀ ako zûÀkladnû§ nûÀstroj na vyhodnotenie sû¤áasnûˋho stavu problematiky z rûÇznych háƒadûÙsk.
4 Posû¤denie procesu pomocou SWOT analû§zy
V rûÀmci SWOT analû§zy (Tab. 1) je zhodnotenû§ celû§ proces spracovanû§ v prûÙspevku. SWOT analû§za je zûÀkladnû§m nûÀstrojom, ktorû§ sa pouéƒûÙva na vyhodnotenie sû¤áasnûˋho stavu z rûÇznych háƒadûÙsk, a to z háƒadiska silnû§ch a slabû§ch strûÀnok, prûÙleéƒitosti a ohrozenûÙ. ZûÀroveé naártûÀva moéƒnûˋ alternatûÙvy budû¤ceho vû§voja, moéƒnosti na ich vyuéƒitie, prûÙpadne ich rieéÀenie. SWOT analû§za je vlastne kombinûÀciou analû§zy O-T a S-W. O-T analû§za predstavuje vonkajéÀiu – externû¤ analû§zu, zameriavajû¤cu sa najmûÊ na vonkajéÀie prostredie (prûÙleéƒitosti a ohrozenia). S-W analû§za predstavuje vnû¤tornû¤ – internû¤ analû§zu, v ktorej ide o rozbor vnû¤tornû§ch faktorov problematiky. [9]
| O – OPPORTUNITIES PRûLEé§ITOSTI | T – THREATS OHROZENIA |
|
|
| S – STRENGHTS SILNû STRûNKY | W – WEAKNESSES SLABû STRûNKY |
|
|
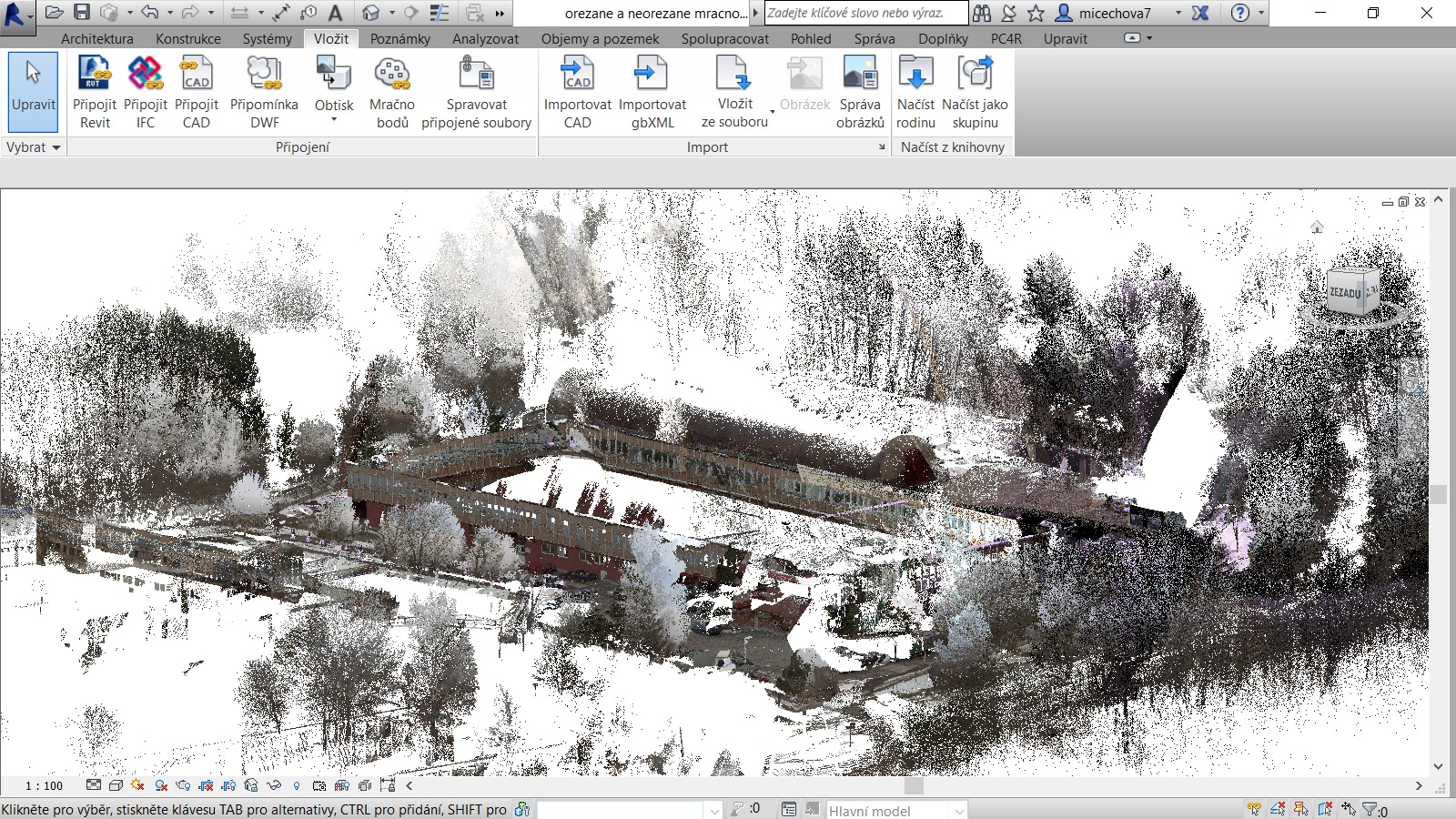
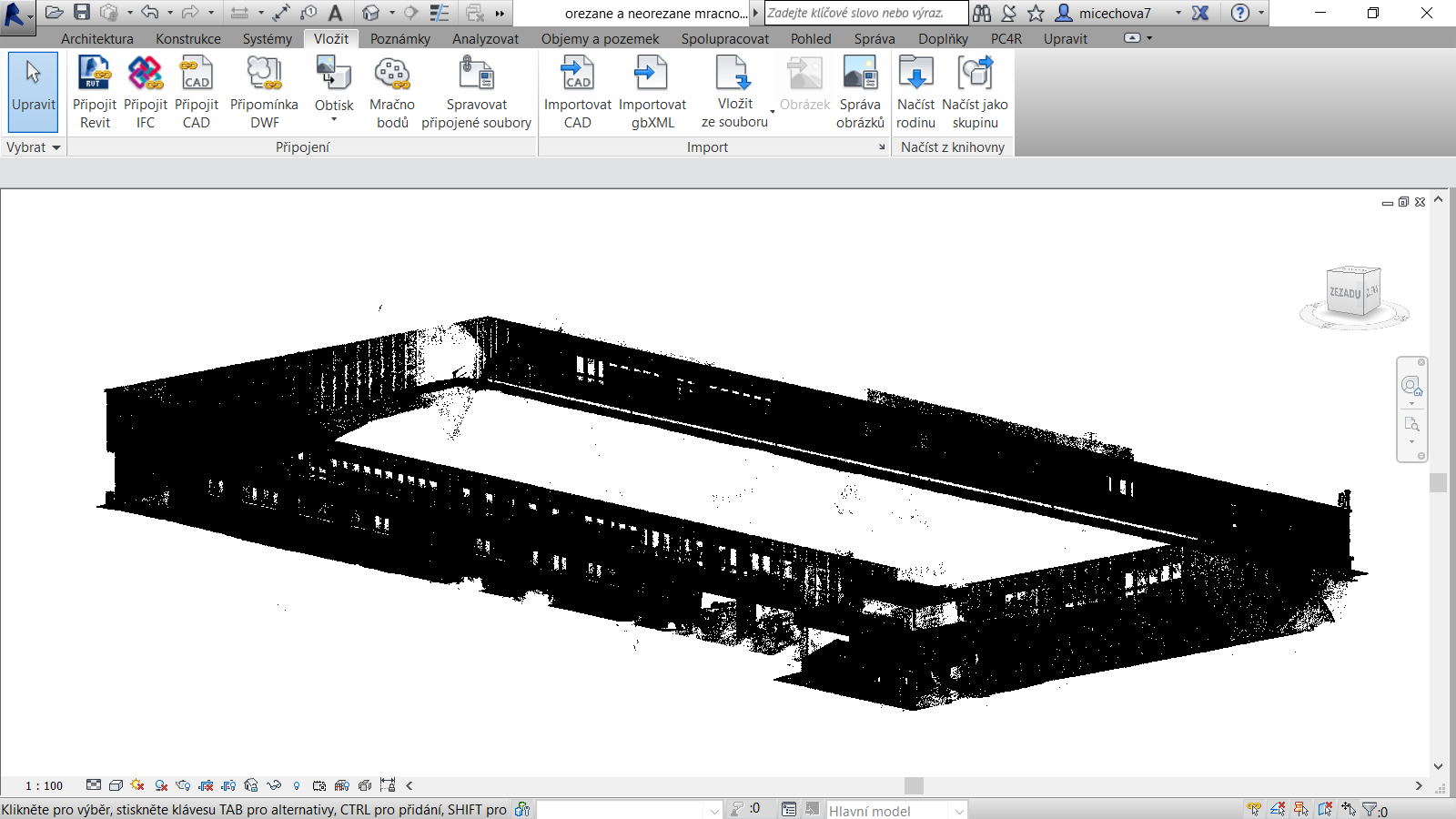
Nepostaáuje iba identifikûÀcia jednotlivû§ch silnû§ch a slabû§ch strûÀnok alebo prûÙleéƒitostûÙ a hrozieb, pretoéƒe tû§m vznikûÀ len zoznam poloéƒiek, ktorû§ neobsahuje áaléÀie rieéÀenie situûÀcie. Preto je potrebnûˋ jednotlivûˋ poloéƒky zoznamu rozanalyzovaéË a ohodnotiéË ich vplyv na proces ako celok. NajlepéÀie prednosti sû¤ takûˋ, ktorûˋ sû¤ éÀpecifickûˋ a je zloéƒitûˋ ich uráitû§m spûÇsobom napodobniéË, áûÙm v podstate vytvûÀrajû¤ konkurenánû¤ vû§hodu. Pre prûÙpad prûÙspevku, kde bol rieéÀenû§ proces zûÙskania, transformûÀcie a vyuéƒitia nameranû§ch dûÀt (reprezentovanû§ch point cloudom) v prostredûÙ BIM je moéƒnûˋ jednoznaáne uvieséË, éƒe v celom procese prevlûÀdajû¤ najmûÊ pozitûÙvne strûÀnky. Kritickûˋ miesta je potrebnûˋ eliminovaéË na minimum, keáéƒe brûÀnia aktivitûÀm a efektûÙvnemu vû§konu. Pre tento prûÙpad je moéƒnûˋ slabûˋ strûÀnky eliminovaéË procesom riadenia rizûÙk, prûÙpadne kontinuûÀlnym investovanûÙm do áƒudskû§ch zdrojov, ktorûˋ budû¤ danûˋ procesy realizovaéË. Aj napriek prevlûÀdajû¤cim pozitûÙvam nad negatûÙvami, boli pri spracovanûÙ zistenûˋ aj uráitûˋ slabûˋ strûÀnky v rieéÀenej oblasti a to v spojitosti naprûÙklad s vyuéƒitûÙm 3D mobilnûˋho laserovûˋho skenera na pozemnûˋ stavby. Je potrebnûˋ prihliadaéË nato aby vû§éÀkovû§ dosah lasera bol pre meranû§ objekt dostaáujû¤ci. Z uvedenûˋho vyplû§va, éƒe vû§hodnejéÀie je vyuéƒûÙvaéË mobilnû§ skener pri mapovanûÙ lûÙniovû§ch stavieb, kde dokonca ani nie je nutnûˋ obmedziéË premûÀvku tzn. éƒe meranie je moéƒnûˋ vykonûÀvaéË za plnej prevûÀdzky komunikûÀcie. Pri vyhotovovanûÙ informaánûˋho modelu budovy (Obr. 5) je dûÇleéƒitûˋ dokonale poznaéË softvûˋr, v ktorom informaánû§ model bude vytvorenû§, aby bolo moéƒnûˋ vyuéƒiéË véÀetky vû§hody, ktorûˋ softvûˋr ponû¤ka a tû§m model posunû¤éË na vyéÀéÀiu û¤roveé, priáom mûÇéƒe byéË zabezpeáenûˋ priaznivûˋ zachovanie energiûÙ a prostredia a podpora uéƒûÙvateáƒov k produktûÙvnej prûÀci poáas celej éƒivotnosti budovy.
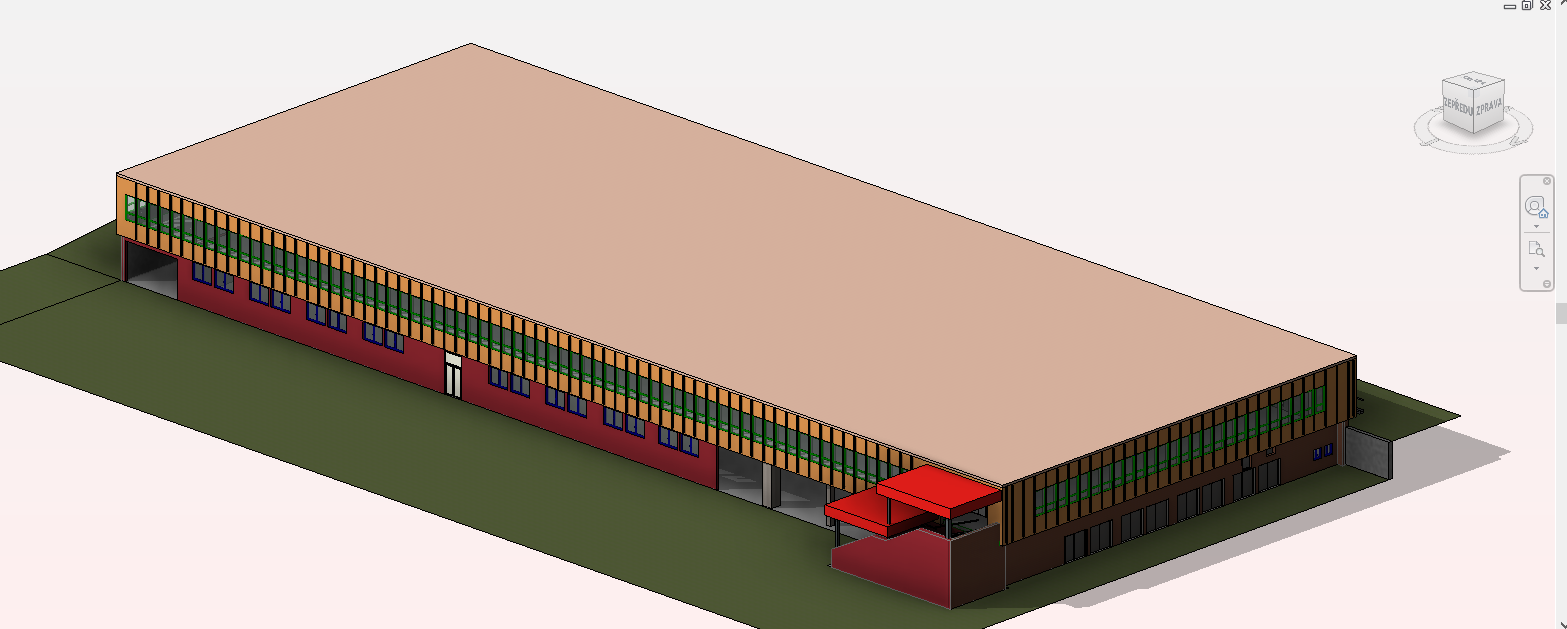
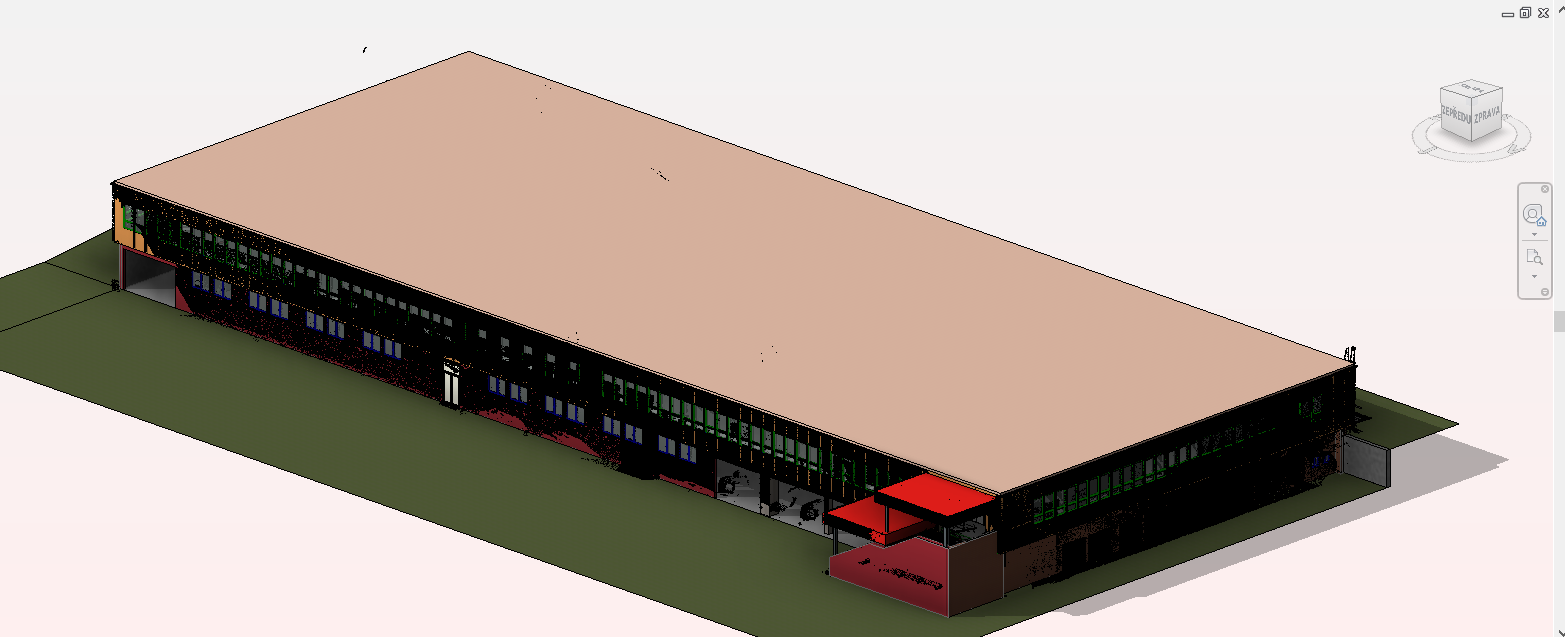
Obr. 5 Poháƒad na vû§slednû§ BIM model bez mraána bodov (váƒavo), s mraánom bodov (vpravo)
5 ZûÀver
PrûÙspevok preháƒadnou formou poukazuje na vû§hody a nevû§hody inovatûÙvnych technolû°giûÙ a ich vyuéƒitia v prostredûÙ stavebnûˋho odvetvia, a to s orientûÀciou na princûÙpy BIM prepojenûˋ s moéƒnoséËami zûÙskavania vstupnû§ch dûÀt prostrednûÙctvom 3D mapovania objektov.
PrûÙspevok je venovanû§ problematike BIM (Building Information Modeling) ako revoluánûˋho spûÇsobu realizûÀcie vybranû§ch û¤konov v rûÀmci prûÙpravy, vû§stavby a sprûÀve budov (Facility managementu) a terestriûÀlnemu laserovûˋmu skenovaniu, ktorûˋ je vû§nimoánûˋ svojou rû§chloséËou, presnoséËou a mnoéƒstvom zbieranû§ch dûÀt. Je to véÀeobecne vyuéƒûÙvanûÀ metû°da zberu dûÀt, ktorûÀ je rû§chla a dûÀta mûÇéƒu byéË veáƒmi podrobnûˋ.
Sû¤beéƒne sa spracoval strategickû§ preháƒad SWOT, ktorû§ poukazuje na niekoáƒko zaujûÙmavû§ch faktov, áalej je poukûÀzanûˋ na ostatnûˋ moéƒnosti vyuéƒitia laserovûˋho skenovania a informaánûˋho modelovania budov. Point cloud poslû¤éƒil na porovnanie existujû¤cej projektovej dokumentûÀcie, teda na odhalenie moéƒnû§ch odchû§lok skutoánûˋho (reûÀlneho) stavu budov od vû§kresovej dokumentûÀcie.
Medzi zaujûÙmavûˋ zistenia je moéƒnûˋ zaradiéË aj skutoánoséË, éƒe slovenskom trhu existuje „diera“ v danom odvetvûÙ spojenom s vyuéƒitûÙm BIM a 3D skenovania objektov. Stavebnûˋ firmy pristupujû¤ aj napriek jestvujû¤cim benefitom k vyuéƒitiu danû§ch prûÙstupov skepticky a odkladajû¤ aktivity spojenûˋ s ich postupnû§m zavûÀdzanûÙm do svojho manaéƒûˋrskeho prostredia. A to aj napriek skutoánosti, éƒe by si tû§m zabezpeáili vyéÀéÀiu mieru konkurencieschopnosti voái ostatnû§m subjektom na trhu.
ZûÀverom je moéƒnûˋ uvieséË, éƒe váaka stûÀle aktuûÀlnejéÀûÙm a silnejû¤cim poéƒiadavkûÀm na efektûÙvnoséË a komplexnoséË realizûÀcie vybranû§ch procesov riadenia stavebnej zûÀkazky, bude v krûÀtkodobom horizonte nevyhnutne kladenû§ stûÀle vûÊáéÀûÙ dûÇraz na vyuéƒûÙvanie nûÀstrojov a princûÙpov budovanû§ch na myéÀlienke informaánûˋho modelovania budov (BIM). Pri sprûÀvnej aplikûÀcii nûÀstrojov uráenû§ch na kreovanie informaánûˋho modelu stavby je moéƒnûˋ docieliéË jednoznaánûˋ procesnûˋ a ekonomickûˋ benefity, ktorûˋ umoéƒnia nielen zûÙskavaéË komplexnûˋ dûÀta o predmetnej stavbe, ale taktieéƒ pristupovaéË k riadeniu procesu sprûÀvy objektov vo véÀetkû§ch fûÀzach ich éƒivotnûˋho cyklu. Taktieéƒ je moéƒnûˋ uvieséË, éƒe danûˋ prûÙnosy prevyéÀujû¤ v koneánom dûÇsledku hlavnû¤ nevû§hodu BIM prûÙstupov, ktorû§m je vyéÀéÀia poáiatoánûÀ investûÙcia spojenûÀ so zabezpeáenûÙm samotnû§ch produktov BIM (licenciûÙ a IKT vybavenia), ako aj s nutnoséËou akceptovaéË zvû§éÀenûˋ nûÀklady uráenûˋ na preéÀkolenie personûÀlu uráenûˋho na prûÀcu s danû§mi aplikûÀciami.
Poáakovanie
Tento prûÙspevok bol vypracovanû§ s podporou projektu „Vû§skumnûˋ centrum é§ilinskej univerzity – ITMS 26220220183“.
Pouéƒitûˋ zdroje
- NAVRûTIL, R. Technologie skenovanûÙ ve 3D [online, prûÙstupnûˋ déa 23. 5. 2017].
- VAéûK, P. 2016. BIM Pilot # 01:mraána bodé₤ nejsou model! [online, prûÙstupnûˋ déa 2. 10. 2018]. Dostupnûˋ na internete: https://www.bimpilot.cz/single-post/2016/05/03/BIM-Pilot-01-mra%C4%8Dna-bod%C5%AF-nejsou-model
- Baudelet, M. a kol. 2014. Laser Spectroscopy for Sensing: undamentals, Techniques and Applications. Elsevier.: Cambridge. 2014. ISBN 978-0-85709-273-1
- TAO, C. V. – Li, J. 2007. Advances in mobile mapping technology. Vol 4. International Society for Photogrammetry and Remote Sensing book series. Taylor & Francis Group. London. 2007. ISBN 0-415-42723-1
2008. 187 s. ISBN 978-80-01-04141-3 - ZûVODNûK, P. 2011. Scan to BIM – jednoduchéÀéÀûÙ péûÙstup k vû§stupé₤m z laser-scanningu [online, prûÙstupnûˋ 23. 5. 2018]
- MIKOLAJ, J. – SCHLOSSER, F. – REMEK, L. – CHYTCAKOVA, A. 2015. Asphalt Concrete Mixtures: Requirements with regard to Life Cycle Assessment. In Advances in Materials Science and Engineering. ISSN 1687-8434, 2015, vol. 2015, Article ID 567238, 7 pages.
- BIM ASOCIûCIA SLOVENSKO, 2016. EfektûÙvny proces kontroly BIM modelu s vyuéƒitûÙm laserovûˋho skenovania [online, prûÙstupnûˋ déa 24. 9. 2018]
- é TRONER, M. – POSPûé IL, J. 2008. Terestrickûˋ skenovacûÙ systûˋmy. 1. vyd. Praha: áeskûˋ vysokûˋ uáenûÙ v Praze.
- HANZELKOVû, A. – KEéKOVSKû, M. 2017. Strategickûˋ éûÙzenûÙ, 2017. 256 s. ISBN 9788074006371.
The paper is focused on the evaluation of the possibilities using the diagnosis of building objects and outcomes of the mobile 3D scanning process of existing objects and their software transformation using Building Information Modeling (BIM). Emphasis is placed on the creation of building object based on the point cloud determined by 3D mobile mapping. The main objective was to process measured data from mobile mapping, import data into the Autodesk Revit program and create a BIM model. A partial objective was to compare the resulting object originating from the point cloud to the existing project documentation. Conclusion of the paper is evaluating the process through SWOT analysis.