Analû§za mobilnûÙho laserovûˋho skenovûÀnûÙ ve stavebnictvûÙ
MobilnûÙ laserovûˋ skenovûÀnûÙ (MLS) je v souáasnûˋ dobá báéƒná vyuéƒûÙvûÀno v éadá geodetickû§ch aplikacûÙ. ZpéesnánûÙ bodovû§ch mraáen MLS se obvykle provûÀdûÙ zvyéÀovûÀnûÙm poátu vlûÙcovacûÙch bodé₤ (VB), kterûˋ jsou rovnomárná rozmûÙstánûˋ v rûÀmci mapovanûˋho û¤zemûÙ. Péesnost bodovû§ch mraáen lze vylepéÀit takûˋ vûÙcenûÀsobnû§mi pré₤jezdy mobilnûÙho mapovacûÙho systûˋmu (MMS). CûÙlem tohoto álûÀnku je navrhnout vhodnû§ postup, kterû§m by bylo moéƒnûˋ odstranit lokûÀlnûÙ deformace bodovû§ch mraáen MLS. Navréƒenû§ postup je zaloéƒenû§ na porovnûÀnûÙ bodovû§ch mraáen z vûÙcenûÀsobnû§ch pré₤jezdé₤ MMS. Do mûÙst, kde rozdûÙly mezi bodovû§mi mraány dosahujûÙ vátéÀûÙch hodnot, jsou pak cûÙlená péidûÀvûÀny daléÀûÙ VB.
1. ûvod
Technologie mobilnûÙho laserovûˋho skenovûÀnûÙ (MLS) je v souáasnûˋ dobá vyuéƒûÙvûÀna pro éÀirokûˋ spektrum geodetickû§ch aplikacûÙ. Mraána bodé₤, kterûÀ jsou produktem MLS, nachûÀzejûÙ uplatnánûÙ zejmûˋna v dopravnûÙm stavitelstvûÙ, vodnûÙm hospodûÀéstvûÙ, péi mapovûÀnûÙ pro potéeby katastru nemovitostûÙ a daléÀûÙch aplikacûÙch [1, 2]. Vû§slednûÀ péesnost produkté₤, zaloéƒenû§ch na bodovû§ch mraánech MLS, je zûÀvislûÀ na mnoha faktorech – na kvalitá a péesnosti uráenûÙ trajektorie MLS, poátu a konfiguraci vlûÙcovacûÙch bodé₤ (VB), hustotá bodovû§ch mraáen a na algoritmech pouéƒitû§ch péi zpracovûÀnûÙ.
Geometrickou péesnost mraáen bodé₤ lze zlepéÀit s vyuéƒitûÙm signalizovanû§ch vlûÙcovacûÙch bodé₤ [3] máéenû§ch báhem nákolika pré₤jezdé₤ mobilnûÙho mapovacûÙho systûˋmu (MMS) [4]. ZvyéÀovûÀnûÙ poátu vlûÙcovacûÙch bodé₤ vede k prodluéƒovûÀnûÙ procesu a zvyéÀovûÀnûÙ nûÀkladé₤. ZûÀkladnûÙm cûÙlem je minimalizace poátu vlûÙcovacûÙch bodé₤ péi souáasnûˋm zachovûÀnûÙ péijatelnûˋ geometrickûˋ péesnosti vû§slednû§ch bodovû§ch mraáen.
Obecná existujûÙ dva zûÀkladnûÙ péûÙstupy pro testovûÀnûÙ geometrickûˋ péesnosti bodovû§ch mraáen. PrvnûÙ péûÙstup je zaloéƒenû§ na péesnûˋ sûÙti kontrolnûÙch bodé₤, jejichéƒ souéadnice jsou porovnûÀny se souéadnicemi táchto bodé₤, zûÙskanû§mi z mraána bodé₤ MLS. Druhû§ péûÙstup je zaloéƒenû§ na porovnûÀnûÙ mraána MLS s referenánûÙm bodovû§m mraánem, kterûˋ mûÀ lepéÀûÙ geometrickou péesnost a ideûÀlná i vátéÀûÙ hustotu neéƒ testovanûˋ mraáno. ReferenánûÙ mraáno mé₤éƒe bû§t vytvoéeno napéûÙklad s vyuéƒitûÙm terestrickûˋho laserovûˋho skenovûÀnûÙ (TLS).
PorovnûÀnûÙm mraáen z MLS a TLS se zabû§vali Johnson et al. [5], kteéûÙ uráovali péesnost 4 komeránûÙch MMS. Péesnost vû§slednû§ch bodovû§ch mraáen dosahovala hodnoty ±80 mm v horizontûÀlnûÙ sloéƒce souéadnic a ±50 mm ve sloéƒce vertikûÀlnûÙ. Tyto hodnoty jsou uvedeny jako intervaly 95% spolehlivosti, tedy péûÙsluéÀnûˋ nûÀsobky smárodatnû§ch odchylek tûσ [6]. Podobnûˋ testovûÀnûÙ péesnosti MLS provedli i Fryskowska a Wrû°blewski [7], kteéûÙ porovnûÀvali rozmáry geometrickû§ch parametré₤ stavebnûÙch prvké₤ (napé. hran stéech). Odhad péesnosti áinil ±60 mm v horizontûÀlnûÙ sloéƒce souéadnic a ±42 mm ve sloéƒce vertikûÀlnûÙ (zde jsou uvûÀdány jednonûÀsobky smárodatnû§ch odchylek 1ûσ).
ZûÀsadnûÙ vliv na péesnost vû§slednû§ch bodovû§ch mraáen mûÀ i péesnost uráenûÙ trajektorie MMS. é patnûˋ podmûÙnky pro pozorovûÀnûÙ druéƒic GlobûÀlnûÙch navigaánûÙch satelitnûÙch systûˋmé₤ (GNSS), ke kterû§m dochûÀzûÙ zejmûˋna péi mapovûÀnûÙ ve mástech a zalesnánû§ch oblastech (zûÀkryty oblohy budovami a stromy), vû§znamná zhoréÀujûÙ kvalitu vû§slednûˋ trajektorie MMS [8]. Kvalitu trajektorie vypoátenûˋ z dat GNSS pomûÀhajûÙ vylepéÀovat takûˋ data z inerciûÀlnûÙ máéicûÙ jednotky (IMU) a z odometru (DMI). SprûÀvnû§ plûÀn nûÀjezdu MMS a kontrola kvality GNSS dat jsou vhodnû§mi nûÀstroji pro odhad kvality trajektorie MMS.
CûÙlem tohoto álûÀnku je navrhnout vhodnû§ postup, pomocûÙ kterûˋho bude moéƒnûˋ odstranit lokûÀlnûÙ deformace bodovû§ch mraáen, kterûˋ vznikajûÙ dûÙky nepéesnostem áûÀstûÙ trajektorie MMS.
2. MMS RIEGL VMX-450
MMS RIEGL VMX-450 (Obr. 1) je modulûÀrnûÙ systûˋm sklûÀdajûÙcûÙ se v zûÀkladnûÙ konfiguraci ze dvou laserovû§ch skeneré₤ RIEGL VQ-450, átyé modulûÀrnûÙch kamer RIEGL VMX-450-CS6, GNSS péijûÙmaáe, IMU, odometru RIEGL VMX-450-DMI a éûÙdicûÙ jednotky RIEGL VMX-450-CU. MMS je doplnán o panoramatickou kameru Point Grey ladybug5. Vybranûˋ parametry systûˋmu jsou uvedeny v Tab. 1.


Obr. 1: MMS RIEGL VMX-450
AbsolutnûÙ polohovûÀ a û¤hlovûÀ péesnost deklarovanûÀ vû§robcem je splnitelnûÀ pouze za péedpokladu dobrû§ch podmûÙnek pro máéenûÙ GNSS (minimûÀlnûÙ vû§padky signûÀlu), vyuéƒitûÙ dat z DMI a péi uéƒitûÙ metody dvojitû§ch diferencûÙ (péipojenûÙ na referenánûÙ stanici, péûÙpadná sûÙéË permanentnûÙch stanic GNSS). Hodnoty relativnûÙ polohovûˋ péesnosti v Tab. 1 odpovûÙdajûÙ situaci, kdy je vzdûÀlenost mezi sousednûÙmi VB maximûÀlná 100 m.
| Senzor | NûÀzev parametru | Hodnota parametru |
|---|---|---|
| VQ-450 | Princip máéenûÙ | doba letu paprsku |
| MaximûÀlnûÙ rychlost pulsé₤ | 1,1 MHz (2 û 550 kHz) | |
| MaximûÀlnûÙ rychlost otûÀáek zrcadla | 400 otûÀáek/s | |
| VnájéÀûÙ péesnost | 8 mm (1ûσ na vzdûÀlenost 50 m) | |
| VniténûÙ péesnost | 5 mm (1ûσ na vzdûÀlenost 50 m) | |
| GNSS/IMU | AbsolutnûÙ polohovûÀ péesnost | 0,02–0,05 m (1ûσ) |
| RelativnûÙ polohovûÀ péesnost | 0,01 m (1ûσ péi vzdûÀlenostech sousednûÙch VB < 100 m) | |
| ûhlovûÀ péesnost (roll, pitch) | 0,005ô¯ (1ûσ) | |
| ûhlovûÀ péesnost (yaw) | 0,015ô¯ (1ûσ) |
3. PoéûÙzenûÙ a zpracovûÀnûÙ dat
Data MMS byla poéûÙzena s vyuéƒitûÙm dvou 600 m dlouhû§ch protismárnû§ch pré₤jezdé₤ péi rychlosti vozidla 20 km/h. MapovanûÀ oblast mála rozmáry péibliéƒná 190 û 90 m. Vû§éÀkovûÀ álenitost û¤zemûÙ (váetná budov) dosahovala hodnoty 20 m. Data MLS byla poéizovûÀna péi frekvenci 1,1 MHz. Trajektorie MMS byla zpracovûÀna s vyuéƒitûÙm programu Applanix POSPac. KinematickûÀ GNSS data byla zpracovûÀna metodou dvojitû§ch diferencûÙ s péipojenûÙm na sûÙéË permanentnûÙch GNSS stanic CZEPOS. Do vû§poátu trajektorie byla zahrnuta i data z IMU a DMI.
ZpracovûÀnûÙ dat MLS bylo provedeno v programu RIEGL RiPROCESS. ZpracovûÀnûÙ v RiPROCESS se sklûÀdûÀ z konverze dat, generovûÀnûÙ mraáen bodé₤ a transformace mraáen bodé₤ s vyuéƒitûÙm vlûÙcovacûÙch bodé₤. V prvnûÙm kroku byla vytvoéena bodovûÀ mraána MLS na zûÀkladá trajektorie z Applanix POSPac. NûÀsledná byly v táchto mraánech manuûÀlná identifikovûÀny rovnomárná rozmûÙstánûˋ VB v nákolika variantûÀch:
- 6 VB (vzdûÀlenost mezi body do 100 m v souladu s doporuáenûÙm vû§robce; viz Tab. 1),
- 10 VB,
- 13 VB (vzdûÀlenost mezi body 50 m; dvojnûÀsobnûÀ hustota VB oproti variantá 6 VB),
- 6+2 VB (6 rovnomárná rozmûÙstánû§ch VB + 2 VB cûÙlená péidanûˋ do problematickû§ch oblastûÙ, viz kap. 3).
Pouéƒitûˋ VB jsou souáûÀstûÙ testovacûÙho pole, kterûˋ mûÀ vû§znamná vyéÀéÀûÙ péesnost, neéƒ je oáekûÀvanûÀ péesnost vû§sledké₤ MLS. Odhad hodnoty prostorovûˋ smárodatnûˋ odchylky VB s3D = ±2,0 mm [10]. ZpéesnánûÙ trajektorie MMS na zûÀkladá vlûÙcovûÀnûÙ bylo provedeno s vyuéƒitûÙm modulu RiPRECISION. Vû§sledkem zpracovûÀnûÙ byla dvá bodovûÀ mraána (ze dvou protismárnû§ch pré₤jezdé₤ MMS), péiáeméƒ kaéƒdûˋ z nich obsahovalo péibliéƒná 123 000 000 bodé₤.



Obr. 2: Konfigurace 6 VB (vlevo), 10 VB (uprostéed), 13 VB (vpravo)
ReferenánûÙ TLS mraáno bylo vytvoéeno na zûÀkladá máéenûÙ dváma pozemnûÙmi laserovû§mi skenery Faro Focus3D X 130. ReferenánûÙ TLS mraáno bylo vlûÙcovûÀno na body testovacûÙho pole. Odhad hodnoty prostorovûˋ smárodatnûˋ odchylky referenánûÙho TLS mraána s3D = ±8,5 mm. Filtrace mraáen MLS a nûÀslednûˋ porovnûÀnûÙ s referenánûÙm mraánem TLS bylo provedeno v programu CloudCompare v2.11.
NejdéûÙve byla porovnûÀna mraána z prvnûÙho a druhûˋho pré₤jezdu MMS mezi sebou, potûˋ kaéƒdûˋ zvlûÀéÀéË s referenánûÙm TLS mraánem. Do 2 problematickû§ch oblastûÙ, identifikovanû§ch ve variantá s 6 VB (vzdûÀlenost mezi VB 100 m), byly cûÙlená péidûÀny 2 VB (viz kap. 3). NûÀsledná byla mraána z prvnûÙho a druhûˋho pré₤jezdu MMS spojena a porovnûÀna s referenánûÙm TLS mraánem. Provedena byla i kontrola kvality (QC) GNSS dat s vyuéƒitûÙm software G-Nut / Anubis [11].
VeéÀkerûÀ porovnûÀnûÙ bodovû§ch mraáen a nûÀslednûˋ analû§zy jejich péesnosti byly éeéÀeny pouze ve vertikûÀlnûÙ sloéƒce souéadnic. Pro jednotlivûˋ varianty byly vypoáteny globûÀlnûÙ charakteristiky péesnosti v podobá odhadé₤ vertikûÀlnûÙ smárodatnûˋ odchylky sv (konfidenánûÙ interval 68 %). DûÀle byly podle [10] jednotlivûˋ varianty testovûÀny na relativnûÙ áetnost vû§skytu vyboáujûÙcûÙch (5% kritickûÀ hodnota) a odlehlû§ch (1% kritickûÀ hodnota) hodnot rozdûÙlé₤. ZvlûÀéÀéË byla testovûÀna péesnost i ve 2 identifikovanû§ch problematickû§ch oblastech.
4. Vû§sledky
V nûÀsledujûÙcûÙch obrûÀzcûÙch jsou vizualizovûÀny vertikûÀlnûÙ sloéƒky rozdûÙlé₤ mezi mraány. Obr. 3 znûÀzoréuje porovnûÀnûÙ mraána z prvnûÙho pré₤jezdu s mraánem z druhûˋho pré₤jezdu MMS ve variantá 6 VB (vzdûÀlenost VB nepéekroáila 100 m dle doporuáenûÙ vû§robce viz kap. 2). V Obr. 3 lze identifikovat dvá oblasti s vû§znamnû§mi rozdûÙly mezi mraány. PorovnûÀnûÙ bodovû§ch mraáen z prvnûÙho a druhûˋho pré₤jezdu MMS s referenánûÙm TLS mraánem je znûÀzornáno na Obr. 4. Z obrûÀzku je patrnûˋ, éƒe k deformacûÙm mraána (tedy nepéesnostem v trajektorii MMS) doéÀlo zejmûˋna báhem druhûˋho pré₤jezdu MMS.
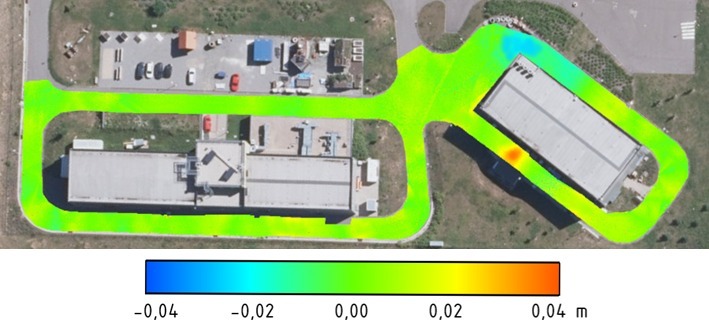
Obr. 3: RozdûÙly bodovû§ch mraáen ze dvou protismárnû§ch pré₤jezdé₤ MMS
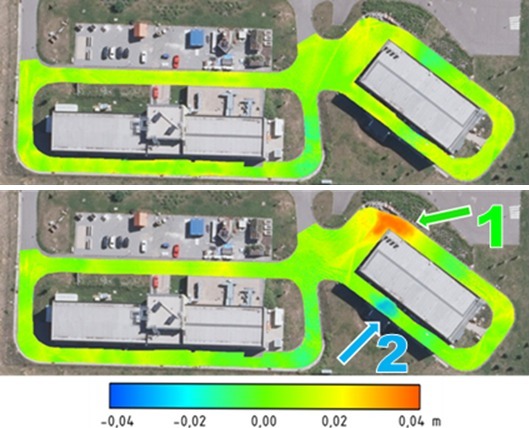
Obr. 4: RozdûÙl referenánûÙho TLS mraána a mraána MLS z prvnûÙho (nahoée) a druhûˋho (dole) pré₤jezdu
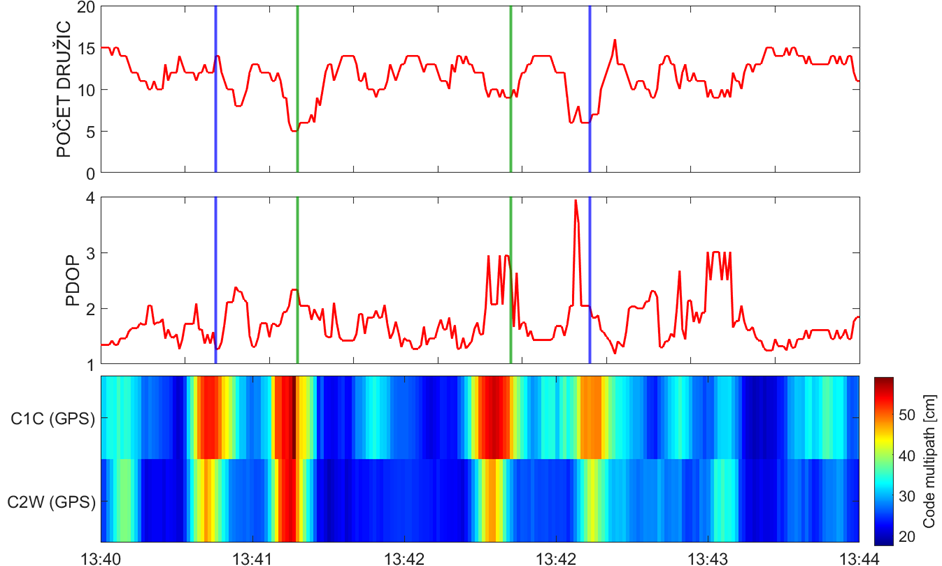
Obr. 5: Vybranûˋ vû§sledky QC: poáet druéƒic (nahoée), PDOP (uprostéed), multipath (dole)
Vybranûˋ vû§sledky QC z G-Nut / Anubis znûÀzoréuje Obr. 5. Svislûˋ áûÀry v Obr. 5 jsou v áûÀstech trajektorie, kterûˋ odpovûÙdajûÙ problematickû§m oblastem v mraánech MMS (v Obr. 4 jsou oznaáeny éÀipkami odpovûÙdajûÙcûÙ barvy). V táchto áûÀstech trajektorie doéÀlo ke znaánûˋmu poklesu poátu druéƒic a nûÀré₤stu hodnoty PDOP. ZûÀroveé vû§znamná vzrostla hodnota multipath (tj. chyby v máéenûÙch GNSS vznikajûÙcûÙ v dé₤sledku odrazu signûÀlé₤ od objekté₤).
PorovnûÀnûÙ bodovû§ch mraáen z prvnûÙho a druhûˋho pré₤jezdu MMS s referenánûÙm TLS mraánem ve variantá 6+2 VB je znûÀzornáno na Obr. 6. Z tohoto obrûÀzku je patrnûˋ, éƒe dûÙky cûÙlenûˋmu péidûÀnûÙ jednoho VB do kaéƒdûˋ inkriminovanûˋ oblasti (celkem 2) byly odstranány lokûÀlnûÙ deformace, kterû§mi trpálo mraáno z druhûˋho pré₤jezdu MMS.
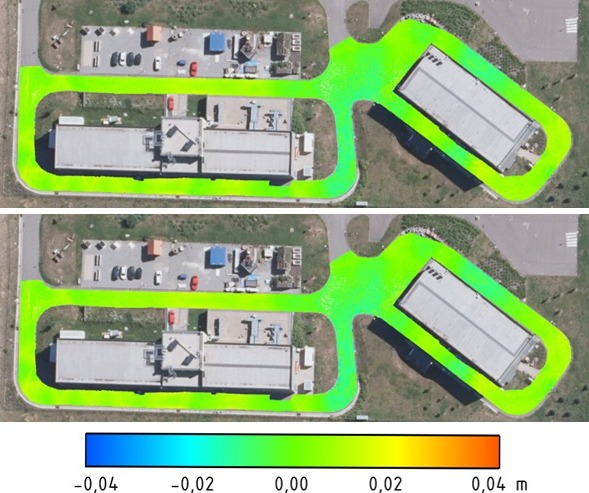
PorovnûÀnûÙ vû§slednû§ch bodovû§ch MLS mraáen z variant 6+2 VB (vzdûÀlenost mezi body 100 m), 10 VB a 13 VB (vzdûÀlenost mezi body 50 m) s referenánûÙm TLS mraánem je zobrazeno na Obr. 7.
Obr. 6: PorovnûÀnûÙ referenánûÙho TLS bodovûˋho mraána a bodovûˋho mraána MLS z prvnûÙho (nahoée) a druhûˋho (dole) pré₤jezdu po péidûÀnûÙ 2 VB

Obr. 7: PorovnanûÙ referenánûÙho TLS bodovûˋho mraána s bodovû§mi MLS mraány vlûÙcovanû§mi na 6+2 VB (nahoée), 10 VB (uprostéed) a 13 VB (dole)
GlobûÀlnûÙ charakteristiky péesnosti vû§slednû§ch bodovû§ch mraáen z jednotlivû§ch variant v podobá odhadé₤ hodnot vertikûÀlnûÙch smárodatnû§ch odchylek a relativnûÙch áetnostûÙ vyboáujûÙcûÙch a odlehlû§ch hodnot rozdûÙlé₤ jsou uvedeny v Tab. 1. ProcentuûÀlnûÙ zastoupenûÙ vyboáujûÙcûÙch/odlehlû§ch hodnot z jednotlivû§ch variant, kterûˋ péipadajûÙ do 2 identifikovanû§ch problûˋmovû§ch oblastûÙ (viz Obr. 4) je uvedeno v Tab. 3.
| Varianta | sV [mm] | ||
|---|---|---|---|
| Sv | % vyboáujûÙcûÙch | % odlehlû§ch | |
| 6 VB | 8,4 | 2,8 | 2,1 |
| 6+2 VB | 7,1 | 2,1 | 1,3 |
| 10 VB | 8,2 | 2,6 | 1,7 |
| 13 VB | 7,9 | 2,5 | 1,5 |
| Varianta | OBLAST 1 | OBLAST 2 | ||
|---|---|---|---|---|
| % vyboáujûÙcûÙch | % odlehlû§ch | % vyboáujûÙcûÙch | % odlehlû§ch | |
| 6 VB | 28,1 | 44,4 | 23,0 | 36,7 |
| 6+2 VB | 7,0 | 2,7 | 4,1 | 1,3 |
| 10 VB | 13,4 | 20,3 | 9,2 | 14,3 |
| 13 VB | 6,2 | 1,3 | 4,1 | 1,1 |
5. ZûÀvár
é patnûˋ observaánûÙ podmûÙnky GNSS mohou zpé₤sobovat chyby v trajektorii MMS a nûÀsledná lokûÀlnûÙ deformace v mraánech MLS. PouéƒitûÙ vlûÙcovacûÙch bodé₤ vû§znamná zlepéÀuje péesnost vû§sledké₤ MLS. NûÀré₤st poátu VB vede k vátéÀûÙ áasovûˋ a ekonomickûˋ nûÀroánosti procesu, ploéÀnûˋ zvyéÀovûÀnûÙ hustoty VB se tudûÙéƒ nejevûÙ jako optimûÀlnûÙ.
Z testovûÀnûÙ vyplû§vûÀ, éƒe vû§slednûÀ péesnost mraána MLS ani péi extrûˋmnûÙ hustotá rovnomárná rozloéƒenû§ch VB (dvojnûÀsobek doporuáenûÙ vû§robce) nenûÙ vyéÀéÀûÙ, neéƒ péesnost mraána s hustotou vlûÙcovacûÙch bodé₤ dle doporuáenûÙ vû§robce a cûÙlená péidanû§mi VB pouze do oblastûÙ, kde vlivem éÀpatnû§ch GNSS podmûÙnek doéÀlo k deformacûÙm mraáen MLS.
OdstranánûÙ deformacûÙ u variant rovnomárná rozmûÙstánû§ch VB (10, 13) je zûÀvislûˋ na tom, jak daleko se nachûÀzûÙ nejbliéƒéÀûÙ vlûÙcovacûÙ bod od deformovanûˋ oblasti.
Jako optimûÀlnûÙ se jevûÙ rovnomárnûˋ vlûÙcovûÀnûÙ v souladu s pokyny vû§robce (vzdûÀlenost mezi VB < 100 m) spoleáná s provedenûÙm minimûÀlná 2 protismárnû§ch pré₤jezdé₤ MMS. PorovnûÀnûÙ bodovû§ch mraáen z jednotlivû§ch pré₤jezdé₤ MMS pak mé₤éƒe indikovat mûÙsta vhodnûÀ k dovlûÙcovûÀnûÙ daléÀûÙmi VB. Jako péidûÀvanûˋ VB pak mohou bû§t vybrûÀny i vhodnûˋ péirozenûˋ objekty, kterûˋ jsou dobée identifikovatelnûˋ v bodovû§ch mraánech TLS. CûÙlenûˋ péidûÀnûÙ VB do identifikovanû§ch problematickû§ch oblastûÙ mé₤éƒe vû§znamná zvû§éÀit zejmûˋna lokûÀlnûÙ péesnost bodovû§ch mraáen MLS bez vû§znamnûˋho navû§éÀenûÙ nûÀkladé₤ celûˋ zakûÀzky.
6. Literatura
- AL-BAYARI, Omar. Mobile mapping systems in civil engineering projects (case studies). Applied Geomatics. 2019, 11(1), 1-13. ISSN 1866-9298. Dostupnûˋ z: https://doi.org/10.1007/s12518-018-0222-6
- WANG, CH et al. A Survey of Mobile Laser Scanning Applications and Key Techniques over Urban Areas. Remote Sensing. 2019, 11(13). ISSN 2072-4292. Dostupnûˋ z: https://doi.org/10.3390/rs11131540
- SCHAER, P.; VALLET J. Trajectory Adjustment of Mobile Laser Scan Data In GPS Denied Enviroments. ISPRS – International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. 2016, XL-3/W4, 61-64. ISSN 2194-9034. Dostupnûˋ z: https://doi.org/10.5194/isprsarchives-XL-3-W4-61-2016
- NOLAN, J. et al. Multi-Pass Approach for Mobile Terrestrial Laser Scanning. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences. 2015, II-3/W5, 105-112. ISSN 2194-9050. Dostupnûˋ z:
https://doi.org/10.5194/isprsannals-II-3-W5-105-2015 - JOHNSON, S. D. et al. Laser mobile mapping standards and applications in transportation: Joint Transportation Research Program Publication No. FHWA/IN/JTRP-2016/01. Purdue University, 2016. Dostupnûˋ z:
https://doi.org/10.5703/1288284316164 - HAMPACHER, M.; é TRONER, M. ZpracovûÀnûÙ a analû§za máéenûÙ v inéƒenû§rskûˋ geodûˋzii. VydûÀnûÙ druhûˋ, upravenûˋ a doplnánûˋ. Praha: áeskûˋ vysokûˋ uáenûÙ technickûˋ v Praze, 2015. ISBN 978-80-01-05843-5.
- FRYSKOWSKA, A.; WRûBLEWSKI P. Mobile Laser Scanning accuracy assessment for the purpose of base-map updating. Geodesy and Cartography. 2018, 67(1), 35-55. Dostupnûˋ z: https://doi.org/10.24425/118701
- HUSSNAIN, Z. el al. Enhanced trajectory estimation of mobile laser scanners using aerial images. ISPRS Journal of Photogrammetry and Remote Sensing [online]. 2021, 173, 66-78. ISSN 09242716. Dostupnûˋ z:
https://doi.org/10.1016/j.isprsjprs.2021.01.005 - Riegl Laser Measurement Systems GmBH, RIEGL VMX-450: Compact Mobile Laser System, Data Sheet, 2015.
- KALVODA, P. et al. Accuracy Evaluation and Comparison of Mobile Laser Scanning and Mobile Photogrammetry Data. IOP Conference Series: Earth and Environmental Science. 2020, 609. ISSN 1755-1315. Dostupnûˋ z:
https://doi.org/10.1088/1755-1315/609/1/012091 - VACLAVOVIC, P.; DOUSA, J. G-Nut/Anubis: Open-Source Tool for Multi-GNSS Data Monitoring with a Multipath Detection for New Signals, Frequencies and Constellations. RIZOS, Chris a Pascal WILLIS, ed. IAG 150 Years. Cham: Springer International Publishing, 2016, 2015-5-7, s. 775–782. International Association of Geodesy Symposia. ISBN 978-3-319-24603-1. Dostupnûˋ z: https://doi.org/10.1007/1345_2015_97
PodákovûÀnûÙ
álûÀnek vznikl v rûÀmci éeéÀenûÙ projektu Specifickûˋho vû§zkumu VUT v Brná FAST-S-21-7484.
álûÀnek je aktuûÀlnûÙ, dobée zpracovanû§, prospáéÀnû§ nejenom pro samotnou geodûˋzii, ale pro celou oblast stavebnictvûÙ a vodnûÙho hospodûÀéstvûÙ. Doporuáuji k vydûÀnûÙ.
Mobile laser scanning (MLS) is currently commonly used in many surveying applications. The refinement of MLS point clouds is usually done by increasing the number of control points (CP) equally distributed within the mapped area. The accuracy of point clouds can also be improved by multiple passes of the mobile mapping system (MMS). This paper deals with the proposal of a suitable procedure by which it would be possible to remove local deformations of MLS point clouds. The proposed approach is based on the comparison of point clouds from multiple MMS passes. Additional CPs are then added to the places where the more significant differences between the point clouds.