AutomatizovanÃḂ kontrola kvality realizÃḂcie stavebnÃẄch objektov
ÄlÃḂnok sa zaoberÃḂ informaÄnÃẄm modelovanÃm stavieb a tvorbou digitÃḂlnych dvojÄiat stavieb vyuÅẅitÃm modernÃẄch metÃġd zberu priestorovÃẄch Ãẃdajov (TLS a fotogrametria), priÄom predstavuje algoritmus na automatizovanÃẃ kontrolu vyhotovenia stavebnÃẄch objektov. Popisuje algoritmus pre automatizovanÃẃ tvorbu rozdielovÃẄch modelov medzi BIM modelom a Ãẃdajmi zÃskanÃẄmi z TLS resp. fotogrametricky. VÃẄsledky slÃẃÅẅia na verifikÃḂciu geometrickÃẄch parametrov konÅḂtrukÄnÃẄch prvkov (ako napr. rovinnosÅċ stien, priamosÅċ potrubÃ), ako aj urÄenie odchÃẄlok ich umiestnenia (poloha a orientÃḂcia) od samotného projektu (BIM modelu). Takto zÃskané Ãẃdaje slÃẃÅẅia ako podklad na kvalifikÃḂciu a kvantifikÃḂciu odchÃẄlok poÄas riadenia vÃẄstavby.


ÄlÃḂnek byl vydÃḂn v rÃḂmci odborné konference doktorského studia Juniorstav 2021. Byl ocenÄn odbornou porotou konference a okomentovÃḂn spolupracovnÃky redakce TZB Info.
1. Ãvod
V sÃẃÄasnej dobe vstupujÃẃ informaÄné technolÃġgie Äoraz intenzÃvnejÅḂie do procesu Åẅivotného cyklu stavby od projektovania aÅẅ po prevÃḂdzku stavieb. VhodnÃẄm nÃḂstrojom, ktorÃẄ sa v poslednÃẄch rokoch vyuÅẅÃva poÄas celého Åẅivota stavby, je informaÄné modelovanie stavieb (v angl. Building Information Modelling) znÃḂme pod pojmom BIM, ktorého vÃẄsledkom je virtuÃḂlny model stavby (BIM model). Na Slovensku je v poslednÃẄch rokoch intenzÃvna snaha zavÃḂdzaÅċ BIM do stavebného cyklu, ktorého neoddeliteÄẅnou sÃẃÄasÅċou sÃẃ aj geodeti a tÃẄm pÃḂdom BIM predstavuje novÃẄ prÃstup k vÃẄkonu geodetickÃẄch a kartografickÃẄch Äinnostà v investiÄnej vÃẄstavbe. BIM model spolu s inovatÃvnymi metÃġdami zberu priestorovÃẄch informÃḂcià umoÅẅÅujÃẃ detailnÃẃ kontrolu skutoÄného vyhotovenia stavebnÃẄch diel. V sÃẃÄasnosti najefektÃvnejÅḂÃmi metÃġdami zberu informÃḂcià sÃẃ terestrické laserové skenovanie (TLS) resp. blÃzka fotogrametria, ktorÃẄch vÃẄsledkom sÃẃ mraÄnÃḂ bodov. PrÃḂve vyuÅẅitie informÃḂcià obsiahnutÃẄch v detailnÃẄch mraÄnÃḂch bodov a informÃḂcià BIM modelu je vhodnÃẄm nÃḂstrojom na kontrolu kvality daného diela, ÄastokrÃḂt aÅẅ v reÃḂlnom Äase.
CieÄẅom predkladaného ÄlÃḂnku je predstaviÅċ nÃḂvrh automatizovaného algoritmu na kontrolu vyhotovenia stavebnÃẄch objektov v softvérovom prostredà Matlab©, priÄom pre automatizovanÃẄ vÃẄpoÄet bola vytvorenÃḂ samostatnÃḂ aplikÃḂcia. AplikÃḂcia slÃẃÅẅi na kontrolu kvality realizÃḂcie stavebnÃẄch objektov, priÄom vstupnÃẄmi Ãẃdajmi sÃẃ BIM model (projekt) a mraÄno bodov (realizÃḂcia).
2. AplikÃḂcia pre automatizovanÃẃ kontrolu stavebnÃẄch objektov
AutomatizovanÃḂ kontrola stavebnÃẄch objektov znamenÃḂ kontrolu polohy, orientÃḂcie a rovinnosti stien. OdchÃẄlky realizovaného stavebného objektu od projektu sÃẃ vyjadrené rozdielovÃẄmi modelmi. K tomu, aby mohli byÅċ vyhotovené rozdielové modely, je potrebné zÃskaÅċ roviny jednotlivÃẄch geometrickÃẄch objektov z projektu (BIM modelu) a z realizÃḂcie (mraÄna bodov).
InformaÄné modelovanie stavieb (BIM) je 3D modelovanie stavieb, vyuÅẅÃvané v rÃṀznych odvetviach stavebného priemyslu, ktorého vÃẄsledkom je BIM model. Posledné roky je BIM vo svete aj na Slovensku vyuÅẅÃvané Äoraz ÄastejÅḂie pri novÃẄch projektoch, ale aj pri rekonÅḂtruovanÃẄch stavbÃḂch. NakoÄẅko sa BIM modely vyuÅẅÃvajÃẃ poÄas celého Åẅivota stavby, je potrebné vyuÅẅÃvaÅċ vÃẄmenné formÃḂty pre zdieÄẅanie dÃḂt. ExistujÃẃ rÃṀzne vÃẄmenné formÃḂty pre BIM modely, naprÃklad CAD formÃḂty, CIS/2, CityGML, priÄom kaÅẅdÃẄ vÃẄmennÃẄ formÃḂt je zameranÃẄ na iné Ãẃdaje. NajÄastejÅḂie pouÅẅÃvanÃẄm vÃẄmennÃẄm formÃḂtom je IFC (v angl. Industry Foundation Classes). IFC je textovÃẄ sÃẃbor v ASCII (v angl. American Standard Code for Information Interchange) kÃġde, ktorého cieÄẅom je poskytnÃẃÅċ otvorenÃẄ a neutrÃḂlny prÃstup na ukladanie a vÃẄmenu BIM modelov medzi rÃṀznymi softvérovÃẄmi aplikÃḂciami [1].
Pre zber priestorovÃẄch Ãẃdajov je jednou z najefektÃvnejÅḂÃch metÃġd terestrické laserové skenovanie (TLS), ktorého vÃẄsledkom je mraÄno bodov. MetÃġdou TLS je moÅẅné vykonaÅċ bezkontaktnÃẄ zber Ãẃdajov, ktorÃẄ je v porovnanà s inÃẄmi metÃġdami rÃẄchlejÅḂà a vÃẄsledok je detailnÃẄ (vzhÄẅadom na parametre skenovania). MraÄnÃḂ bodov sa ÄastokrÃḂt pouÅẅÃvajÃẃ na generovanie geometrie pre BIM modely.
IdentifikÃḂcia geometrickÃẄch parametrov rovÃn z IFC sÃẃboru
VÃẄmennÃẄ formÃḂt IFC predstavuje otvorenÃẃ ÅḂpecifikÃḂciu pre Ãẃdaje z BIM modelov o geometrickÃẄch objektoch, ktoré sa vymieÅajÃẃ a zdieÄẅajÃẃ medzi rÃṀznymi ÃẃÄastnÃkmi projektu stavby alebo sprÃḂvy budov [1]. FormÃḂt IFC vyvinulo medzinÃḂrodné zdruÅẅenie pre interoperabilitu (v angl. BuildingSMART), priÄom je ÅḂtandardizovanÃẄ normou ISO 16739:2018 Industry Foundation Classes (IFC) pre zdieÄẅanie dÃḂt v stavebnÃctve a facility managemente.
IFC sa skladÃḂ z hlaviÄky a z popisu geometrickÃẄch prvkov v rÃḂmci BIM modelu. Zo sÃẃboru je potrebné identifikovaÅċ pre jeden prvok sÃẃradnice zaÄiatoÄného bodu (IfcCartesianPoint), smer (IfcDirection), dÄẃÅẅku (RectangleProfileDef), vÃẄÅḂku (IfcExtrudeAreaSolid) a hrÃẃbku (IfcWall) (Obr. 1).
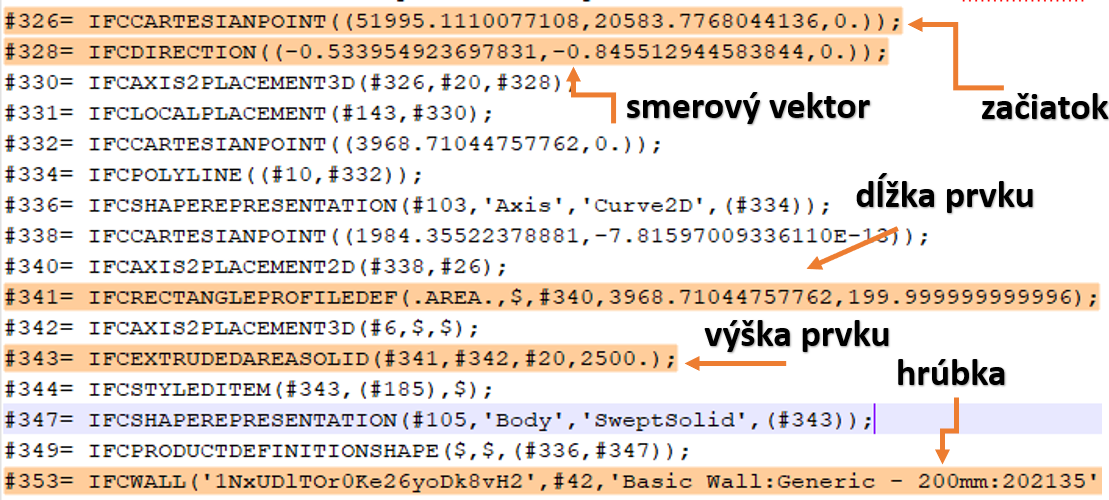
Obr. 1 DefinÃcia geometrie steny v IFC sÃẃbore
Identifikované Ãẃdaje slÃẃÅẅia na odhad parametrov roviny steny, priÄom sa najprv vypoÄÃtajÃẃ sÃẃradnice ÅḂtyroch rohov roviny steny pomocou priestorovej polÃḂrnej metÃġdy, z nich sa nÃḂsledne vypoÄÃta ÅċaÅẅisko roviny steny. Na zÃḂklade tÃẄchto bodov sa odhadujÃẃ koeficienty vÅḂeobecnej rovnice roviny steny (1) pomocou singulÃḂrnej dekompozÃcie matice redukovanÃẄch sÃẃradnÃc.
kde a, b, c sÃẃ prvky normÃḂlového vektora, d je ÄÃslo, ktorého hodnota sa rovnÃḂ skalÃḂrnemu sÃẃÄinu normÃḂlového vektora a polohového vektora ÄẅubovoÄẅného bodu, X, Y, Z sÃẃ priestorové sÃẃradnice bodu.
SegmentÃḂcia rovÃn z mraÄna bodov
Algoritmus na spracovanie mraÄien bodov je zaloÅẅenÃẄ na kombinÃḂcià prvkov modifikovaného RANSAC (v angl. RANdom SAmple Consensus) algoritmu a metÃġdy povrchov [2], pomocou ktorého segmentuje z mraÄna bodov roviny prislÃẃchajÃẃce rovinÃḂm identifikovanÃẄm z IFC. SamotnÃẄ RANSAC algoritmus je zaloÅẅenÃẄ na iterÃḂciÃḂch odhadnutÃẄch parametrov geometrickÃẄch prvkov zo sÃẃboru pozorovanÃẄch Ãẃdajov, ktoré obsahujÃẃ odÄẅahlé hodnoty [3].
SegmentÃḂcia sa zaÄÃna vÃẄberom 100 najbliÅẅÅḂÃch bodov od ÅċaÅẅiska roviny steny (zÃskanÃẄ z IFC sÃẃboru), priÄom poÄet prvÃẄch bodov zÃḂvisà od hustoty mraÄna bodov. NÃḂsledne sa oblasÅċ tÃẄchto bodov aproximuje rovinou, ktorÃḂ sa odhaduje ortogonÃḂlnou regresiou [2]. V tomto prÃpade vychÃḂdza rieÅḂenie zo vÅḂeobecnej rovnice roviny (1). VyuÅẅÃva sa ÅċaÅẅisko roviny steny, ktoré sa zÃska z IFC, priÄom sa vyuÅẅÃva vzÅċah (2).
 (2)
(2)
kde X, Y, Z sÃẃ sÃẃradnice 4 rohov rovÃn steny. NÃḂsledne sa urÄia redukované sÃẃradnice (sÃẃradnicové rozdiely) vzÅċahom:
Äalej sa pomocou sÃẃradnicovÃẄch rozdielov zostavà matica redukovanÃẄch sÃẃradnÃc a vykonÃḂ sa singulÃḂrny rozklad matice (v angl. Singular Value Decomposition) redukovanÃẄch sÃẃradnÃc rieÅḂenÃm rovnice [3]:
kde A je matica redukovanÃẄch sÃẃradnÃc, stÄẃpcové vektory U sÃẃ normované vlastné vektory matice AAT, V sÃẃ normované vlastné vektory matice ATA a Σ je diagonÃḂlna matica s prvÃẄmi tromi singulÃḂrnymi ÄÃslami matice ATA na hlavnej diagonÃḂle. NormÃḂlovÃẄ vektor regresnej roviny je teda stÄẃpcovÃẄm vektorom matice V, ktorÃḂ prislÃẃcha najmenÅḂiemu singulÃḂrnemu ÄÃslu matice ATA [3]. TÃẄmto spÃṀsobom sÃẃ zÃskané koeficienty a, b, c vÅḂeobecnej rovnice roviny, ktoré tvoria normÃḂlny vektor roviny. Parameter d sa zÃska, tÃẄm Åẅe sa do normÃḂlneho vektora dosadia sÃẃradnice ÅċaÅẅiska X0, Y0, Z0, vypoÄÃtaného z mraÄna vybranÃẄch bodov (5).
V ÄalÅḂom kroku sa oblasÅċ vybranÃẄch bodov zvÃĊÄÅḂà na 1000 najbliÅẅÅḂÃch bodov a testuje sa, Äi leÅẅia v odhadnutej rovine. Algoritmus pri kaÅẅdom zvÃĊÄÅḂenà poÄtu vybranÃẄch bodov porovnÃḂva, Äi leÅẅia v odhadnutej rovine z predchÃḂdzajÃẃcej iterÃḂcie [2]. Rovina je prepoÄÃtanÃḂ po kaÅẅdej iterÃḂcii pomocou vÅḂetkÃẄch bodov, ktoré spÄẃÅajÃẃ kritérium ortogonÃḂlnej vzdialenosti od odhadnutej roviny. V kaÅẅdej ÄalÅḂej iterÃḂcià sa poÄet bodov zvÃĊÄÅḂuje ÅḂtvornÃḂsobne a opakuje sa vÃẄpoÄet pomocou vzÅċahov (2) aÅẅ (5). IteratÃvny vÃẄpoÄet prebieha dovtedy, kÃẄm oblasÅċ roviny prestane rÃḂsÅċ, resp. pokÃẄm sa nÃḂjde vÅẅdy aspoÅ jeden bod, ktorÃẄ by ovplyvnil odhadnutÃẃ rovinu [4]. PrahovÃḂ hodnota, ktorÃḂ nÃḂm udÃḂva dÄẃÅẅkové kritérium pre vzdialenosÅċ segmentovanÃẄch bodov od odhadnutej regresnej roviny, je v tomto prÃpade odporÃẃÄanÃḂ v intervale do 100 mm.
FiltrÃḂcia bodov na zÃḂklade normÃḂlovÃẄch vektorov
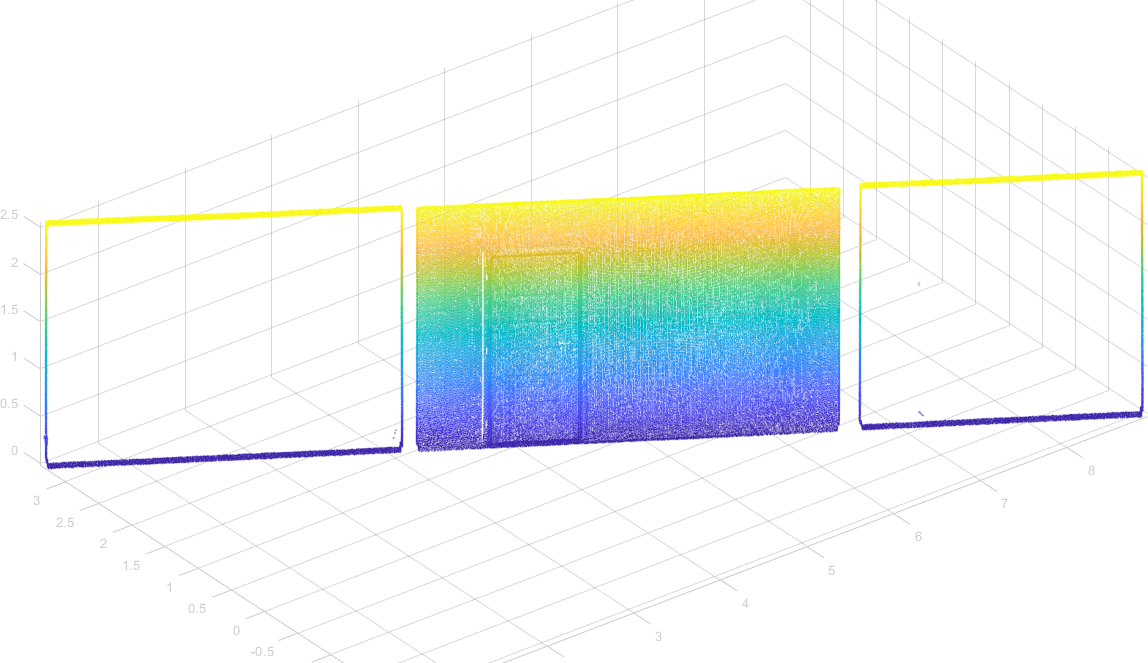
Obr. 2 Segmentované body pred filtrÃḂciou na zÃḂklade normÃḂl
Po segmentÃḂcià sa pristupuje ku filtrÃḂcià bodov na zÃḂklade lokÃḂlnych normÃḂl bodov mraÄna, nakoÄẅko sa pri segmentÃḂcià vyuÅẅÃva dÄẃÅẅkové kritérium, pri ktorom sa segmentujÃẃ nielen body roviny steny, ale aj vedÄẅajÅḂÃch konÅḂtrukÄnÃẄch prvkov, ktoré vyhovujÃẃ dÄẃÅẅkovému kritériu (Obr. 2).
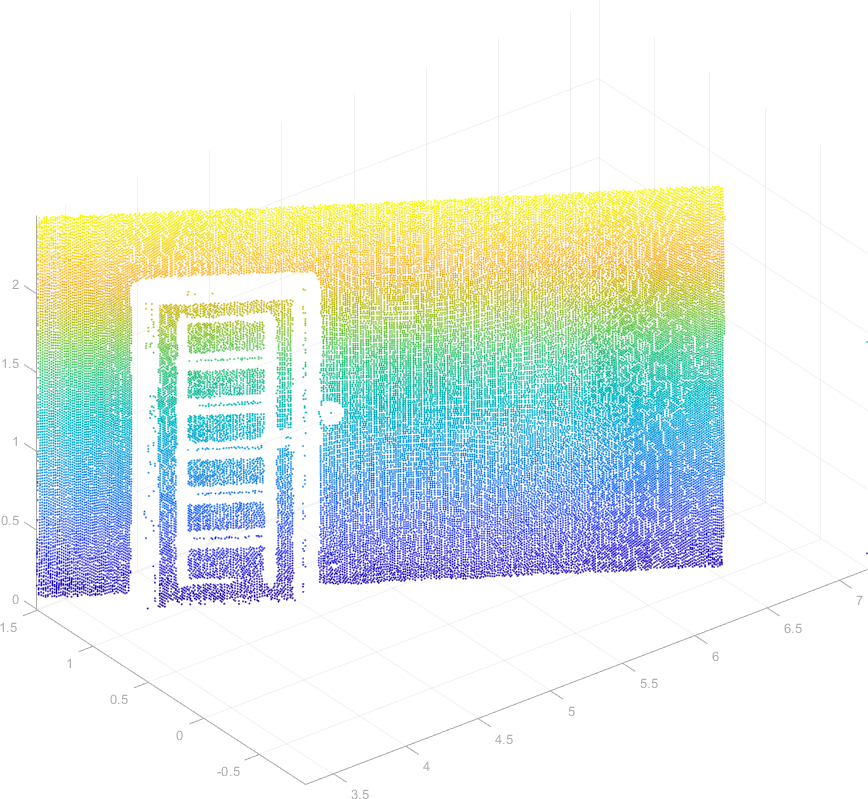
Obr. 3 Segmentované body po filtrÃḂcii na zÃḂklade normÃḂl
V prvom kroku segmentÃḂcie sa aplikuje na mraÄno bodov vÃẄpoÄet lokÃḂlnych normÃḂl v kaÅẅdom bode mraÄna, a to tak, Åẅe je odhadnutÃḂ lokÃḂlna rovina z k-najbliÅẅÅḂÃch susedov (v angl. Nearest Neighbor). PoÄet najbliÅẅÅḂÃch bodov definuje veÄẅkosÅċ roviny, ku ktorej sa poÄÃtajÃẃ normÃḂly v danom bode mraÄna a zÃḂvisà od hustoty mraÄna bodov. VypoÄÃtané normÃḂlové vektory sa skalÃḂrne vynÃḂsobia normÃḂlovÃẄm vektorom prÃsluÅḂnÃẄch rovÃn zÃskanÃẄch po segmentÃḂcià (6) a nÃḂsledne je moÅẅné vypoÄÃtaÅċ uhol, ktorÃẄ zvierajÃẃ.
kde nPoC je normÃḂlovÃẄ vektor prÃsluÅḂnej regresnej roviny mraÄna bodov a npoint je normÃḂlovÃẄ vektor bodov testovanej lokÃḂlnej roviny.
KeÄÅẅe roviny stien nie sÃẃ dokonalo rovinné, je potrebné definovaÅċ vstupnÃẃ hodnotu pre maximÃḂlne odchÃẄlky normÃḂl. OdporÃẃÄanÃḂ hodnota sÃẃ maximÃḂlne 4ÂḞ pri nerovnÃẄch stenÃḂch. TÃẄmto krokom sa zo segmentovaného mraÄna odstrÃḂnia body, ktoré prislÃẃchajÃẃ konÅḂtrukÄnÃẄm prvkom priamo nesÃẃvisiacimi s rovinou steny (napr. roviny stien vedÄẅajÅḂÃch miestnostÃ, ÄasÅċ dverà apod.) (Obr. 3).
Tvorba rozdielovÃẄch modelov
Pre kaÅẅdÃẃ rovinu steny sa generujÃẃ dva rozdielové modely (Obr. 4, Obr. 5). PrvÃẄ rozdielovÃẄ model je porovnanie roviny BIM modelu a jej prislÃẃchajÃẃcej roviny segmentovanej z mraÄna bodov. DruhÃẄ rozdielovÃẄ model zobrazuje rovinnosÅċ stien. Pre oba rozdielové modely boli poÄÃtané maximÃḂlne a minimÃḂlne odchÃẄlky, priemerné odchÃẄlky a absolÃẃtne maximum odchÃẄlok. Pre prvÃẄ rozdielovÃẄ model, bolo poÄÃtané aj pootoÄenie roll a odchÃẄlka δ dvoch rovÃn. PootoÄenie rovÃn sa poÄÃta vzÅċahom (7) a odchÃẄlku rovÃn sa poÄÃta vzÅċahom (8).
kde roll je natoÄenie rovÃn, nIFC je normÃḂlovÃẄ vektor roviny steny z BIM modelu a nPoC je normÃḂlovÃẄ vektor odhadnutej regresnej roviny zo segmentovaného mraÄna bodov, ktorÃḂ prislÃẃcha rovine steny z BIM modelu.
kde δ je vzdialenosÅċ dvoch regresnÃẄch rovÃn, dIFC je rovnÃẄ skalÃḂrnemu sÃẃÄinu normÃḂlového vektora roviny BIM modelu s ÄẅubovoÄẅnÃẄm polohovÃẄm vektorom roviny BIM modelu a dPoC je rovnÃẄ skalÃḂrnemu sÃẃÄinu normÃḂlového vektora roviny segmentovaného mraÄna bodov s ÄẅubovoÄẅnÃẄm polohovÃẄm vektorom odhadnutej regresnej roviny z mraÄna bodov.
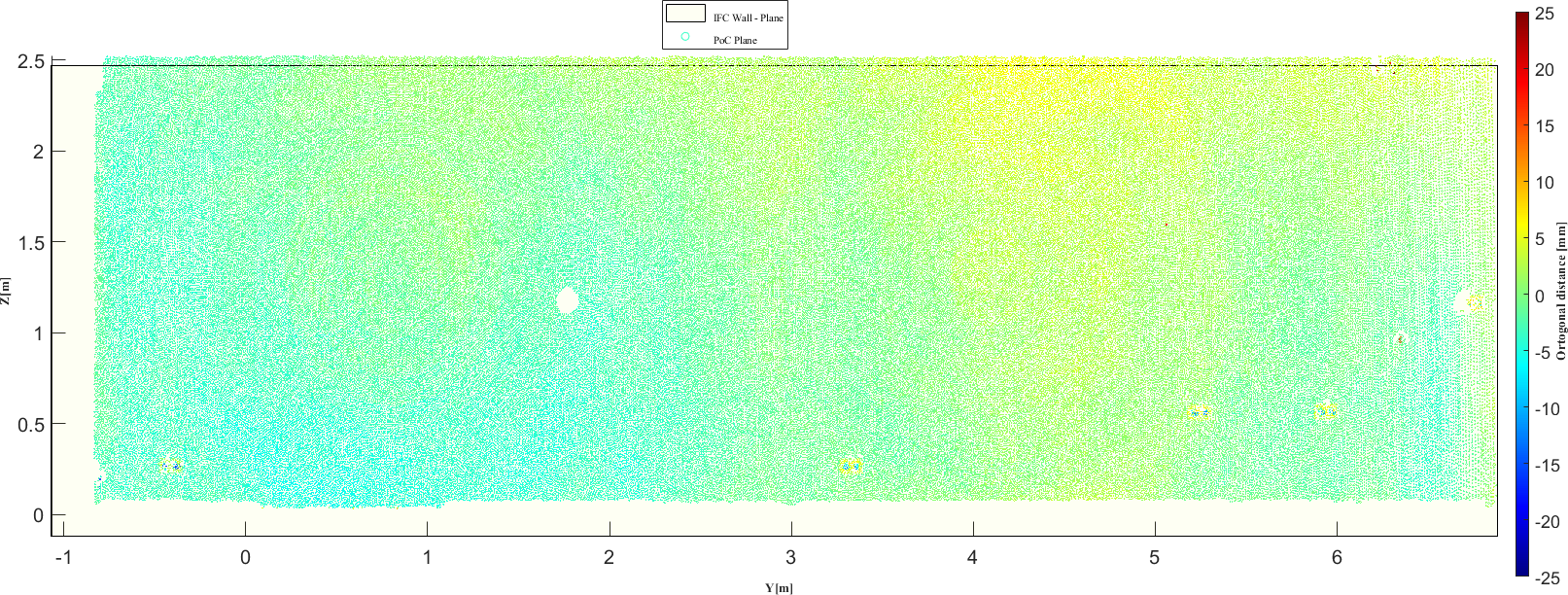
Obr. 4 Porovnanie roviny BIM modelu a regresnej roviny segmentovanej z mraÄna bodov
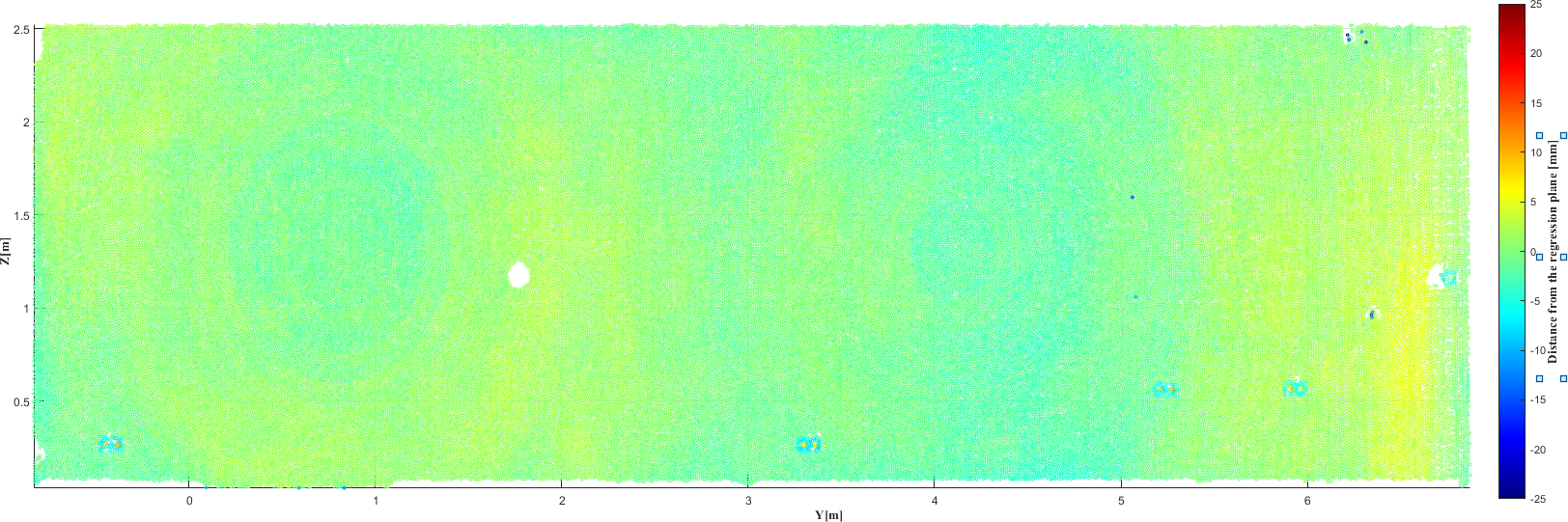
Obr. 5 RovinnosÅċ roviny steny
VÃẄvoj samostatnej aplikÃḂcie
Aby bolo moÅẅné kontrolu stavebnÃẄch objektov vykonaÅċ automatizovane, bola vytvorenÃḂ samostatnÃḂ aplikÃḂcia v softvéri Matlab©. Ako prvé si pouÅẅÃvateÄẅ vyberie v dialÃġgom okne (Obr. 6) adresÃḂr, nÃḂsledne v aplikÃḂcià naÄÃta BIM model vo formÃḂte IFC a mraÄno bodov vo formÃḂte *.pts, *.txt alebo *.xyz. NÃḂsledne pouÅẅÃvateÄẅ definuje vstupné parametre: prahovÃẃ hodnotu pre segmentÃḂciu mraÄna bodov a maximÃḂlnu odchÃẄlku normÃḂl. Po naÄÃtanà vstupnÃẄch sÃẃborov a nastavenà vstupnÃẄch parametrov sa spustà vÃẄpoÄet tlaÄidlom RUN. V rÃḂmci vÃẄpoÄtu prebehne identifikÃḂcia geometrickÃẄch parametrov z IFC, segmentÃḂcia rovÃn z mraÄna bodov a vÃẄpoÄet vÃẄsledkov kontroly objektu, priÄom vÃẄsledkom sÃẃ 2 rozdielové modely pre kaÅẅdÃẃ rovinu steny a sÃẃbor *.xlsx s ÄÃselnÃẄmi charakteristikami rovÃn.
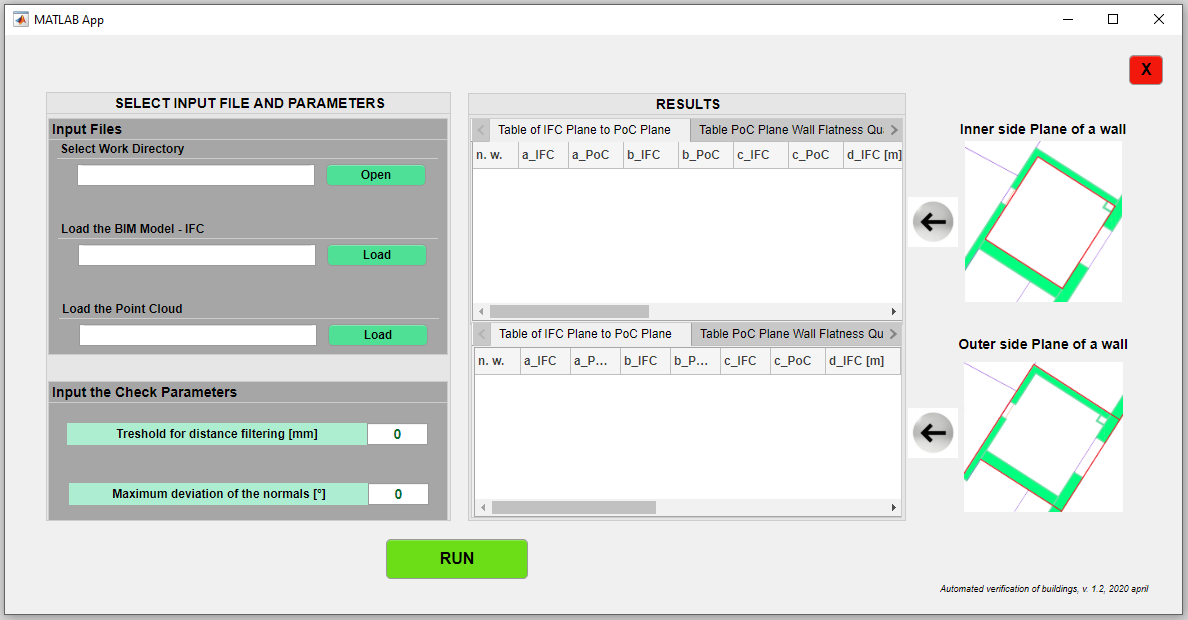
Obr. 6 DialÃġgové okno aplikÃḂcie
3. PrÃpadovÃḂ ÅḂtÃẃdia
VerifikÃḂciu vyÅḂÅḂie spomÃnaného algoritmu sme vykonali na zÃḂklade prÃpadovej ÅḂtÃẃdie, v rÃḂmci ktorej sme kontrolovali geometrické parametre stien bytu na zÃḂklade BIM modelu (Obr. 7) a Ãẃdajov z TLS (Obr. 7). JednÃḂ sa o trojizbovÃẄ byt s rozlohou pribliÅẅne 70 m2. Pre verifikÃḂciu bolo mraÄno bodov prevzorkované na hustotu 10 mm. PrahovÃḂ hodnota pre segmentÃḂciu mraÄien bola 50 mm a maximÃḂlna odchÃẄlka normÃḂl bola volenÃḂ v hodnote 3ÂḞ.
VÃẄsledky porovnania dvoch modelov rovÃn, ktoré ukazujÃẃ najvÃĊÄÅḂie odchÃẄlky sa nachÃḂdzajÃẃ v Tab. 1 aÅẅ Tab. 3, priÄom Tab. 1 sa zaoberÃḂ porovnanÃm parametrov rovÃn z BIM modelu a z mraÄna bodov, Tab. 2 sa nachÃḂdzajÃẃ vzÃḂjomné polohy rovÃn z BIM modelu a mraÄna bodov a Tab. 3 zobrazuje rovinnosÅċ roviny. V tabuÄẅkÃḂch sa nachÃḂdzajÃẃ vÃẄsledky len pre jednu rovinu steny, vzhÄẅadom na rozsah ÄlÃḂnku.
V prÃpade vÅḂetkÃẄch rovÃn bolo maximÃḂlne natoÄenie v hodnote 0,5ÂḞ a maximÃḂlna vzdialenosÅċ rovÃn 49,7 mm. MaximÃḂlna odchÃẄlka bodov mraÄna od roviny bola 65 mm, priÄom tieto maximÃḂ sa vyskytujÃẃ v oblasti elektrickÃẄch zÃḂsuviek. V prÃpade rovinnosti sÃẃ odchÃẄlky v intervale od −35 mm do 35 mm, priÄom tieto maximÃḂ sa nachÃḂdzajÃẃ v oblasti dverÃ, elektrickÃẄch zÃḂsuviek a pod.
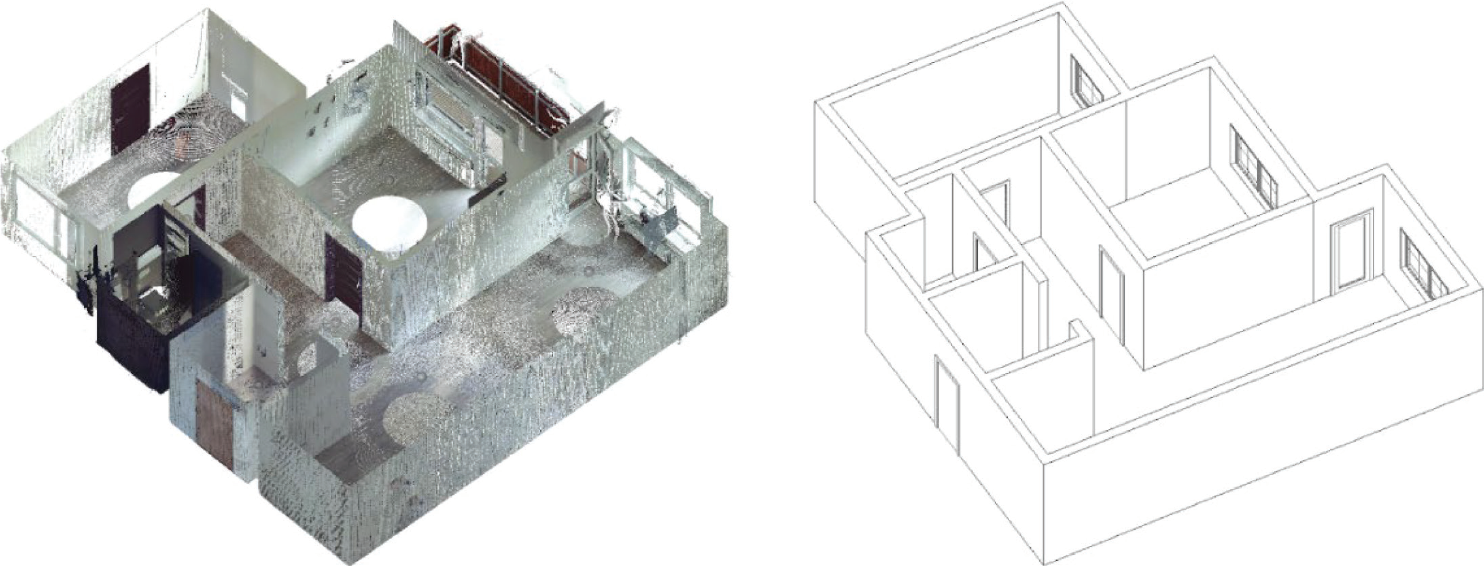
Obr. 7 MraÄno bodov (vÄẅavo) a generalizovanÃẄ BIM model (vpravo) prÃpadovej ÅḂtÃẃdie
| Ä. r. | aIFC | aPoC | bIFC | bPoC | cIFC | cPoC | dIFC [m] | dPoC [m] |
|---|---|---|---|---|---|---|---|---|
| 1 | 0,842 | −0,841 | −0,540 | 0,541 | 0,000 | 0,002 | 1,497 | −1,501 |
| Ä. r. | roll [ÂḞ] | Δ [mm] | max_dev [mm] | min_dev [mm] | avg_dev [mm] | abs_max [mm] |
|---|---|---|---|---|---|---|
| 1 | 0,1 | −4 | 34 | −16 | −1 | 34 |
| Ä. r. | max_dev [mm] | min_dev [mm] | avg_dev [mm] | abs_max [mm] |
|---|---|---|---|---|
| 1 | 14 | −30 | 0 | 30 |
4. ZÃḂver
CieÄẅom predkladaného prÃspevku bolo predstaviÅċ aplikÃḂciu na automatizovanÃẃ kontrolu vyhotovenia stavebnÃẄch objektov, priÄom vstupmi sÃẃ BIM model, ktorÃẄ mÃḂme vo formÃḂte IFC a mraÄno bodov uÅẅ existujÃẃceho stavebného objektu. Pomocou navrhnutej aplikÃḂcie mÃṀÅẅe pouÅẅÃvateÄẅ jednoducho vykonaÅċ geometrické overenie rovÃn stien, priÄom v prÃspevku je v krÃḂtkosti ukÃḂzanÃẄ aj experiment aplikÃḂcie.
PoÄakovanie
PrÃḂca sÃẃvisà s aktivitami vyvÃjanÃẄmi v rÃḂmci rieÅḂenia projektu APVV-18-0247 „AutomatizÃḂcia kontroly elektronickej dokumentÃḂcie stavieb s vyuÅẅitÃm inovatÃvnych technolÃġgià zberu Ãẃdajov a virtuÃḂlnych modelov“.
PouÅẅité zdroje
- ISO 16739-1:2018 — “Industry Foundation Classes (IFC) for data sharing in the construction and facility management industries — Part 1: Data schema” [Internet]. 2018 [cited 2020 Oct 28]. Available from:
https://www.iso.org/standard/70303.html - Honti R., Erdélyi J., KopÃḂÄik A. Plane segmentation from point clouds. Pollack Period [Internet]. 2018 Aug 1 [cited 2020 Oct 29]; 13(2):159–71. Available from: https://akjournals.com/view/journals/606/13/2/article-p159.xml
- Fischler MA, Bolles RC. Random sample consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun ACM. 1981 Jun 1; 24(6):381–95.
- Honti R., Bratislava. SegmentÃḂcia rovÃn. GeodetickÃẄ a kartografickÃẄ obzor. 2019; 89–94.
The paper briefly deals with building information modelling and creation of digital twins of buildings using modern techniques of spatial data collection (TLS). It describes an algorithm for automated verification of the building's structures. It presents algorithms for automated difference model creation between the BIM model and data obtained from TLS or photogrammetry. The results are used to verify the geometric parameters of structural elements (such as flatness of walls, straightness of pipes etc.), as well as to determine deviations in their location (position and orientation from the project itself). The information obtained is a basis for the qualification and quantification of deviations during construction management.