Inteligentní ochrana dveří výtahů technologií 3-D kamery (II)
Druhá část příspěvku, ve kterém uvádíme 3D kameru jako snímač, který překonává svého předchůdce svou kompaktností (je ideální pro montáž na zadní stěnu klece výtahu), způsobem instalace (není zapotřebí propojení snímače a spínače) a svou funkcí (poskytuje omezenou ochranu dveří i bez světelné clony).
Elektronická část
Funkční schéma snímače TOF (viz obrázek 3) znázorňuje překvapivě jednoduché schéma skládající se pouze z několika modulů. Mikroprocesor generuje výchozí signály infračerveného světla a ovládá TOF čip. Tento CMOS TOT čip - srdce snímacího zařízení - obsahuje (24 x 100) 2 400 pixelů, ze kterých se obdrží jednotlivé hodnoty vzdálenosti. V následující části bude vysvětlen princip TOF.
Obrázek 3: Funkční schéma hardwaru snímače
Vysvětlivky k obrázku 3: Napájení 24 V DC; Přeměna napájení; Stav I/0; Stav 0; Infračervené světlo I/0; Indikační dioda; Měření teploty; TOF čip; Infračervené světlo; Optický pásmový filtr; Optika Rx; Optika Tx
Je zapotřebí optický pásmový filtr (se středem vlnové délky 850 nm) k zajištění toho, aby TOF pixely byly vystaveny světlu vycházejícímu z modulovaného světla a ne okolním osvětlením.
Kvůli vyšším teplotám vlnová délka použitého pásma hlídá, aby byla snížena, zatímco infračervené diody, aby byla zvýšena. Bez odpovídajícího opatření by toto mohlo vést k značnému provoznímu nárazu, protože obdržený světelný signál by byl zbytečně oslaben nevhodným pásmovým filtrem. Ke kompenzaci tohoto fyzikálního účinku musí být provozní teplota hlídána a udržována na konstantní úrovni. Protože infračervené diody produkují značnou část teplotní energie, může být teplota nepřímo ovlivňována pracovním cyklem infračerveného světla.
Princip TOF
Zkrácení TOF (Time of Flight) umožňuje efektivní měření doby mezi emisí pulsu a jeho přijetí. Protože světelný paprsek se pohybuje neuvěřitelně vysokou rychlostí (t.j. 300 000 km/s), sledovaná scéna prostoru vstupu do výtahu by mohla být změřena v několika nanosekundách - je to obtížné si představit! Pro přesnou představu každý pixel TOP čipu měří rozdíl fází modulovaného světla spíše než by měřil přímo doby pohybu světla.
Tato skutečnost je symbolicky znázorněna na obrázku 4. Jestliže emitor (t.j. železniční vagon) vyšle světelný paprsek (fotony viditelné jako vozy) s konstantní intenzitou (místo jako znázorněné sinusové vlny), pak každý pixel (železniční trať) přijímače by také přijal konstantní intenzitu závisející na odrazivosti cíle (světlé a tmavé skály). Při tom se z tohoto přijímače nezjistí žádné hodnoty vzdálenosti.
Obrázek 4: Ilustrativní popis principu TOF (Time-of-Flight)
Avšak jestliže intenzita vysílaného světla se mění podle stanoveného vzoru (sinusové vlny), tento vzor může být také na každém pixelu rozeznán v oslabené formě (v závislosti na odrazivosti cíle) a v časové závislosti (v závislosti na vzdálenosti cíle). Proto toto realizujeme, jakmile je intenzita emitovaného světla modulována, každý pixel je schopen využít jak informaci o stupnici šedi (podle tlumení modulačního vzoru), tak informaci o vzdálenosti (podle fázového rozdílu modulačního vzoru).
Při použití tohoto principu pro ochranu výtahových dveří, je použita modulační frekvence 20 MHz, která odpovídá vlnové délce 15 m. Protože se světelný paprsek pohybuje k cíli a pak zpět k přijímači, je maximálně měřená vzdálenost 7,5 m. Na příklad dva cíle ve snímaném prostoru mají skutečnou vzdálenost 3,85 m a 11,25 m by oba způsobily fázový rozdíl 180 stupňů a následkem toho by výsledkem měření byla stejná vzdálenost 3,85 m.
Vybrané problémy softwaru
V úvodu jsme ukázali, že informace o vzdálenosti se nezíská absolutní intenzitou světla měřenou na přijímači, ale jejím kolísáním. Ačkoliv tmavý cíl odráží jen málo světla, kolísání může být vyhodnoceno. Následkem toho by ideální snímač TOF měl být imunní na různou odrazivost cíle. Ačkoliv toto tvrzení není úplně pravdivé pro skutečné aplikace, omezujeme se na analýzu měření vzdálenosti (viz obrázek 5) a pomíjíme vyhodnocování měření intenzity.
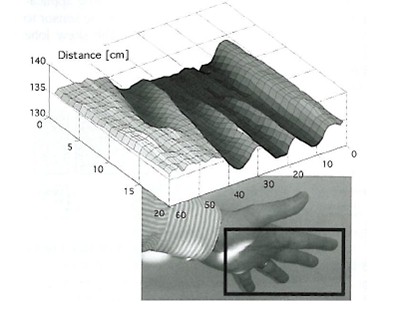
Obrázek 5: Obrázek vzdáleností
Objekty pro snímání a zakrytí
Hlavním úkolem snímače TOF je snímat příslušné objekty v prostoru sledování. Dveře výtahu obyčejně nejsou příslušným objektem, který se má zjistit, aby se zabránilo zbytečné reverzaci. Následující signály poskytují základ pro naši aplikaci.
Měření referenční vzdálenosti
Díky fyzikální nepřesnosti každý TOF pixel je výsledkem jistého měření sklonu (ale nezávislého na času). Pomocí prostředků referenčního měření vzdálenosti při kompletování výrobku lze získat matrici sklonu pro každý jednotlivý TOF snímač. Proto k získání přesného obrazu vzdálenosti při provozu je každé měření opravováno pomocí matrice sklonu (viz obrázek 6, nahoře). Poznamenáváme, že tento způsob pouze vylepšuje spíše absolutní než relativní měření vzdálenosti.
Obrázek 6: Provozní úlohy signálu
Vysvětlivky k obrázku 6:
Měření referenční vzdáleností| Naměřený vztah | Skutečný vztah | Kalibrační obrázek |
Měření absolutní vzdálenosti
| Obrázek bez dveří | Konstantní práh dveří | Zakrytý obrázek |
Měření relativní vzdálenosti
| Obrázek bez objektu | Obrázek s objektem | Rozdílový obrázek |
Měření absolutní vzdálenosti
Absolutní vzdálenost objektu se porovnává s konstantními hranicemi (viz obrázek 6, uprostřed). Máme proto dva důvody:
- Za prvé: Prostor pozorování je třeba kalibrovat. Po otevření dveří v každém podlaží musí být provedeno absolutní měření k rozhodnutí, zda prostor pozorování odpovídá konstantnímu pozadí bez sledovaných objektů.
- Za druhé: Musí být k dispozici absolutní hodnoty k rozeznání objektů v prostoru pro pozorování od (zavíraných) dveří výtahu. Není možné, aby jiné objekty než dveře byly TOF snímači blíže než dveře.
Měření relativní vzdálenosti
Relativní vzdálenosti objektů se porovnávají s ostatními měřenými hranicemi vznikajícími z předchozího obrázku nebo od jiného umístění v témže obrázku (viz obrázek 6, dolní část).
- Dočasné měření relativní vzdálenosti se porovnává s předchozími obrázky. Změny hodnot jsou rozhodující pro rozhodnutí o přítomnosti objektu, ne absolutní hodnoty. Sledování těchto změn také umožňuje sledovat objekty, jako jsou hrany zavírajících se dveří.
- Prostorové měření relativní vzdálenosti porovnává hodnoty různých vzdáleností se stejným obrazem. Odpovídající řešení stanoví, jak blízký může být objekt zobrazený proti pozadí, když se stále snímá. Absolutní vzdálenosti jsou porovnávány s rozdíly vzdáleností mezi pozadím a objektem.
Na obrázku 6 jsou znázorněny tři různé provozní úlohy jako odečtení z měřených obrazů, buď jako porovnání, prahové nebo jiné měření.
Koncept 3D doby
Kontrolní snímač "3D systému" uvedený v předchozí práci obsahuje koncept "3D doby", která spočívá na:
- binární informaci "snímače 3D";
- binární informaci světelné clony;
- binární informaci "snímače 3D" překlenutého spínačem (k rozpoznání stavu dveří).
"Doba 3D" je parametrizována časem t1 a t2, při čemž t1 je větší než t2. "Snímač 3D" je buď uvolněn po době t1 s, jestliže světelná clona nebyla přerušena při zastavení ve stanici; nebo je překryt za t2 s po posledním přerušení světelné clony. Tento koncept optimálně odpovídá statisticky očekávanému přínosu "3D ochrany". TOF spočívající na "3D systému", zde uvedený, musí pracovat bez potřeby kontrolního snímače, t.j. "snímač 3D" je dostatečně inteligentní k vytvoření provozního signálu, včetně "doby 3D".
Na základě výše uvedených informací uvádíme, že:
- "snímač 3D" poskytuje spíše obraz(y) než binární informaci;
- binární informace světelné clony není podstatná;
- stav dveří je třeba stanovit měřením vzdáleností.
I když informace světelné clony není vždy k dispozici, nový koncept "doby 3D" je více sofistikovanější než ten předchozí, protože "snímač 3D" účinně rozeznává, co se děje před dveřmi výtahu. Klíčovým bodem konceptu je to, že jednotlivé doby prodlení závisí na pohybu ve sledovaném prostoru. Obrázek 7 ukazuje klasifikaci "úrovní činnosti" a navíc stav bez objektů.
Obrázek 7: Koncept "3D doby"
Vysvětlivky k obrázku 7: Úroveň doby 3D; Čas; Velký pohybující se objekt; Velký statický objekt; Malý pohybující se objekt; Žádný objekt; Rychlé zavírání dveří; Pomalé zavírání dveří
Po proběhnutí "3D doby" může dát řízení výtahu signál k zavření dveří pomalou rychlostí. (jestliže tuto funkci řízení výtahu poskytuje). Při tom je k dispozici druhý stav "snímače 3D", který umožňuje řízení výtahu rozlišit mezi "uvolněním 3D", protože se zde nevyskytuje žádný objekt (t.j.úroveň 0) nebo jsou zjištěny objekty (t.j. úrovně 1 až 4).
Máme-li k dispozici přesnou informaci o vstupním prostoru, má smysl zmenšit hodnoty ochranného zpoždění v řízení výtahu. Jestliže "3D snímač" nezjistí žádné objekty, není třeba žádné prodlení, které je motivováno statistickým modelem očekávaného "návalu" před výtahem. Z tohoto důvodu vychází konstatování uvedené v úvodu.
Závěr
V předchozí práci jsme porovnávali dva obvykle používané koncepty "3D ochrany dveří", pokud jde o funkci, obecné použití a instalaci. S ohledem na první dvě záležitosti koncept "zdokonaleného 3D" (sestávajícího se z dalšího snímače k obvyklé světelné cloně přeměněné na kompaktní "3D světelnou clonu". Samozřejmě, pokud jde o instalaci, dřívější verze ukazuje více nevýhod proti této novější verzi.
V této práci jsme představili nový "3D snímač" jako součást "3D ochrany dveří", která překonává současné nedostatky. Tento snímač je inteligentní a kompaktní 3D kamera, poskytující přesné a realistické sledování vstupního prostoru a je možné ji rovněž umístit na příčku v extrémně úzkém prostoru.
Tuto koncepci, pouze s malou modifikací softwaru, je možno také použít pro další aplikace, například pro ochranu stranou posuvných dveří (především u výtahů s dveřmi ze skla) nebo křídlových dveří.