Nový systém nestacionární perimetrické ochrany objektů
Otázka spolehlivosti a kvality bezpečnostních systémů je v dnešní době primárním kritériem pro výběr konkrétního typu zabezpečení. Nejrizikovější jsou z tohoto pohledu perimetrické systémy, které prakticky ve všech svých variantách a technologiích výrazně podléhají vlivu vnějších podmínek a rušivých vlivů.
Poznámka redakce na úvod:
Článek navrhuje nové řešení bezpilotního prvku ochrany objektů, nicméně recenzent se k navrhovanému řešení vyjádřil spíše kriticky, viz Komentář recenzenta.
1. Současný stav perimetrické ochrany objektů
Prvky perimetrických systémů jsou detektory, které signalizují narušení vnějších částí střežených areálů u různých rozsáhlých objektů, komplexů budov a podobně. Konstrukce detektorů používaných v perimetrické ochraně, musí odolat klimatickým podmínkám a vnějšímu prostředí. Díky tomu se odlišuje od prvků zabezpečovacích systémů, používaných uvnitř objektů, kde je jasně definované prostředí a možné rušivé vlivy.
U většiny perimetrických systémů se využívá ostraha uzlových bodů, neprovádí se tedy zabezpečení celého venkovního prostoru, ale pouze vytipovaných prostor, u kterých se předpokládá, že je narušitel využije. Systémy monitorující celou chráněnou plochu jsou pro obvyklé komerční zabezpečení poměrně drahé a prakticky se nevyužívají. Systémů pro perimetrickou ochranu je celá řada, mezi ty nejčastěji používané patří střežení hranic pozemku, tedy plotu. V tomto případě se používají infračervené závory a bariéry, mikrovlnné bariéry, zemní detekční kabely a především tenzometrické a indukční plotové systémy. V rámci zkvalitnění ochrany se tyto základní perimetrické systémy kombinují s dalšími fyzikálními principy zabezpečení.
Navržením systému, který by zefektivnil perimetrickou ochranu objektů, především z hlediska dohledu nad celým pozemkem, nebo alespoň jeho větší částí, můžeme zároveň minimalizovat riziko hlášení falešných a planých poplachů a zajistit včasnou reakci na vniknutí narušitele na pozemek, dříve než stihne napáchat nějakou škodu.
2. Návrh nového systému
Návrh a výzkum nestacionárního systému perimetrické ochrany se týká analýzy stávajících systémů používaných ve vnější ochraně objektů se zaměřením především na návrh nového prototypu zařízení, které minimalizuje nedostatky stávajících systémů a zefektivní tak jejich dohled nad pozemkem kolem zabezpečovaných objektů.
Zabezpečení rozsáhlých vnějších ploch je řešeno čidly a detektory, kterých je na trhu hned několik druhů od různých výrobců. Stejně jako ostatní typy detektorů v zabezpečovaných oblastech se neustále vyvíjí. Pro zkvalitnění ostrahy, snížení falešných i planých poplachů a pro zvýšení komfortu osob provádějící ostrahu se velice často perimetrické systémy kombinují jak s obchůzkovými systémy, tak především s kamerovými systémy. Během vývoje nového prototypu nestacionárního zařízení bylo hlavním požadavkem komplexní zajištění celého pozemku s přihlédnutím k tomu, že s běžně využívanými principy detektorů je prakticky nemožné hlídat celý venkovní prostor, např. vzhledem k rozsáhlosti pozemků. Dnes bývají hlídány jen vytipované rizikové oblasti a oplocení pozemku (viz. výše uzlové bezpečnostní body objektu/pozemku). Základem navrhovaného systému byl tedy předpoklad schopnosti kontroly nad kteroukoliv částí pozemku, podle aktuální situace. Zároveň byl kladen důraz na jeho spolehlivost a finanční dostupnost.
3. Vývoj kontrolního systému
Na počátku návrhu musela být zvolena odpovídající technologie samotného zařízení, tak aby odpovídala požadavkům systému a jeho okolí. Vzhledem k rozsáhlosti prostor, které má zařízení monitorovat, byla nezbytná rychlost přesunu zařízení po pozemku a přesnost identifikace místa, které má být pod dohledem (pomocí např. GPS souřadnic). Nároků kladených na zařízení bylo samozřejmě více, především spolehlivost, schopnost monitorování pozemku za různých klimatických podmínek i přenos obrazu snímaného prostoru.
Z těchto důvodů byl navržen prototyp hexakoptéry, který je díky svému pohybu (letu v nízkých a středních výškách) schopen jak rychlého přesunu, tak díky kameře umístěné ve spodní části prototypu, monitorování vybrané oblasti. Přenos dat z kamery je zajištěn vyhrazeným bezdrátovým přenosem on-line na počítač ostrahy a pro případ ztráty signálu se ukládá i na interní paměť mobilního zařízení. Navržená konstrukce je díky šesti vrtulím dostatečně stabilní i za letu v nepříznivém počasí, takže kvalita snímaného obrazu je prakticky za všech testovaných situacích velice dobrá. To spolu s vazbou na počítačovou mapu objektu (budovy, nadmořská výška, porost, komunikace) umožňuje prostředku optimální pohyb k místu poplachu a jeho rychlou, spolehlivou a přitom zcela nenápadnou kontrolu.
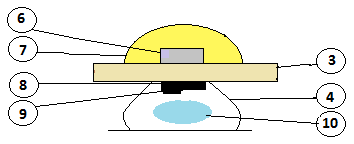
Obr: 1. – Boční řez základního těla
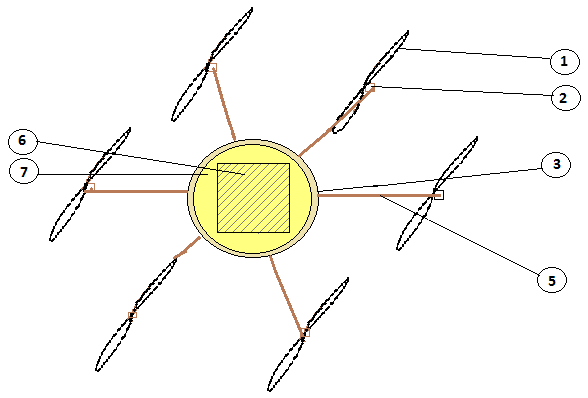
Obr: 2. – Pohled shora
Technické řešení znázorněné na obr. 1. a obr. 2. spočívá ve vytvoření prototypu v podobě hexakoptéry, který slouží jako doplňující systém pro zvýšení efektivity perimetrické ochrany objektů. Prototyp se skládá ze samotné základní desky 3 a hlavní konstrukce 5, na kterých jsou umístěny dílčí komponenty. Základním prvkem je ve vrchní části umístěná řídící elektronika 6 ovládající celý systém, která je chráněná krytem 7 před klimatickými podmínkami. Ve spodní části je uprostřed podvozku 4 prostor pro zavěšenou kameru 10, která během letu snímá požadovaný prostor. Na spodní části základní desky 3 je umístěn akumulátor pro pohyb prototypu 8 a akumulátor 9 pro činnost umístěné kamery a dalších palubních systémů (aktivní výškoměr, umělý horizont, GPS přijímač, prostředky komunikace a prostředky pasivní ochrany prototypu). Pro samotný pohyb prototypu slouží 6 vrtulí 1 poháněných vlastními rotory 2, které při zapnutí systému spustí kontrolu vrtulí 1 a díky akumulátoru 8 umožní prototypu let a plnění požadovaných funkcí.
4. Možnosti systému

Obr: 3. – Příprava před startem
Prototyp hexakoptéru je momentálně na počátku testování (obr. 3). První etapu testů – konfigurace optimálního nastavení palubních přístrojů prototyp již úspěšně absolvoval, stejně tak jako druhou část, kterou bylo optimalizace řídících povelů především ve vztahu k výškoměru a GSM systému. Stabilizace výšky umožňuje přístroji nastavení výšky nad úrovní porostu a dalších překážek na pozemku, ve které se pak přístroj automaticky pohybuje. Během testování bylo ověřeno, že odchylky od předpokládané výšky jsou minimální (v řádech několika centimetrů).
Další testovanou funkcí je stabilizace dle GPS, která umožní přístroji v podstatě stání ve vzduchu na programem definovaném místě. Po měření bylo zjištěno, že odchylky jsou opět v řádech několika centimetrů (i když v tomto případě musela být upravena metodika vyhodnocování, samotný GSM systém je v tomto případě nedostatečně přesný a musela být využita další upřesňující základna). Poslední dosud testovanou funkcí byl tzv. návrat domů, který zajišťuje modulu v případě ztráty řídícího signálu (povelu z řídícího centra či ztráta GSM souřadnic) bezpečný návrat do předem definovaného bodu. Při použití této funkce se prototyp vrací na místo, odkud vzlétl (resp. na definovanou souřadnici). Prozatím byla tato funkce testována na vzdálenost několika stovek metrů s přesností na několik centimetrů. Bude však potřeba podrobněji analyzovat situaci při ztrátě dosahu GSM, zde při návratu dochází k rozdílu až v řádově metrech při vzdálenostech od bodu ztráty signálu řádově stovek metrů.
V současné době probíhají především letové zkoušky, kdy se testují různé palubní přístroje (kamery, systémy pasivní ochrany, zdroje energie) a jejich vliv na letové vlastnosti modulu. Předpokládáme jejich ukončení v průběhu září tohoto roku, pak budou následovat finální testy a úpravy programových modulů, především kritický se jeví automatický návrat do tzv. dokovací stanice, kde dochází k automatickému dobíjení modulu.
Souběžně s tímto testováním se provádějí nezbytné úkony směřující ke splnění předpisů L2 o letectví a zaregistrování prototypu a pilota. Poté proběhne finální testování v příslušných prostorech, které nebudou v rozporu s uvedenými předpisy.
Poslední, nejdůležitější částí testů bude ověření plné automatizace propojení perimetrického systému, která systému předá informaci o místě poplachu, automatický start modulu a jeho přelet na uvedenou souřadnici, detekce a ověření případného narušení včetně přenosu on-line obrazu na pracoviště ostrahy, rozhodnutí o způsobu návratu modulu (návrat do místa startu, alternativně kontrola blízkých bezpečnostních bodů), automatizovaný návrat a přistání do dokovací stanice a přesun obrazových a video dat získaných za letu na externí disk pro jeho archivaci a případně zpětné vyhodnocení. Vyhodnocovací systém pak automaticky navrhne stornování poplachu či jeho potvrzení a realizaci dalších postupů.
5. Závěr
Přínosem tohoto projektu je vytvoření funkčního prototypu zařízení určeného k zajištění efektivnějšího dohledu nad perimetrickou ochranou objektů. Hexakoptéra bude sloužit jako automatizovaná vizuální kontrolní jednotka vázaná na bezpečnostní systém, tedy neslouží jako samostatný bezpečnostní prvek, ale jako kontrolní prvek, respektive kontrolní systém. Hlavní funkcí tohoto řešení je zjištění, z jakého důvodu byl poplach vyvolán, jedná-li se o neoprávněné vniknutí na pozemek nebo o planý poplach (tedy poplach, který nevznikl detekcí narušitele objektu či změnou jiné sledované hodnoty).
Celkové řešení tohoto kontrolního systému je výhodné z několika důvodů, kromě vizuální kontroly, určené k zjištění důvodu vzniku poplachu a schopnosti kontroly nad celým rozsáhlým pozemkem, z hlediska zvýšení efektivnosti a bezpečnosti celého systému.
Na tento projekt byly poskytnuty finanční granty z Interní grantové agentury Technické fakulty ČZU v Praze číslo 31170/1312/3115 a 31170/1312/3118, díky těmto financím bylo možno prototyp sestrojit a nyní je ve fázi testování.
Komentář recenzenta
Jak je v článku správně uvedeno, stacionární perimetrická ochrana není spolehlivá a vykazuje velkou míru falešných detekcí. Z tohoto důvodu se nejčastěji kombinuje s doplňkovými prvky, jejich účelem je především verifikace, tyto doplňkové prvky mnohdy samy o sobě mají detekční vlastnosti.
Jako typického zástupce lze jmenovat kamerové systémy s detekcí pohybu v obraze a možností nastavení tzv. elektronických plotů, případně infračervené kamery s detekcí pohybu a laserové skenery. Jedná se o moderní velmi drahé systémy, určené především pro velké perimetry a ochranu vyšších hodnot například tzv. kritické infrastruktury.
Navržený princip bude vyžadovat poměrně velikou zručnost operátora a zcela určitě nebude laciný. Jeho použití bude velmi limitováno nejen charakterem hlídaného perimetru a plochy, ale především klimatickými podmínkami. Sebelepší stabilizace a inerciální systémy řízení si nedokáží poradit se silným větrem.
Na takové manévry nebude mít uvedený stroj dostatek energie. Pro noční ostrahu bude navíc vyžadovat silné IR přisvícení a ve spojení se samotnou megapixelovou kamerou a radiovým přenosem bude klást velké nároky na baterii.
Z toho je patrné, že jeho operační využití bude poměrně krátké a v záloze budou muset být minimálně jeden až dva další prostředky.
Tento princip je možné použít pouze na vizuální kontrolu, nikoliv na detekci pohybu a už vůbec ne na detekci pohybu v obraze. V samotném článku je navíc uvedena kombinace principů GPS a GSM. GPS je pro inerciální navigaci vhodný, nelze však počítat se zachováním potřebné přesnosti za všech okolností a už vůbec nelze počítat s přesností výškovou. Pro tento účel je nutné mít k dispozici výškoměry a detektory blízkých překážek (antikolizní systém) založené na zcela odlišných principech. V článku uvedené použití technologie GSM je pro tento účel více než diskutabilní.
Z mého pohledu je navrhovaný princip využití bezpilotního prostředku tak trochu naivní. Pro znalce problematiky perimetrické ochrany velkých celků a dostupné personální kvality služby ostrahy zůstane uvedený návrh asi ještě dlouho v oblasti utopie.

V relaci Události 5.6.2013 bylo vidět užití podobného principu pro zcela jiné účely. (od 37:11 min.)
Jan Petr, student informatiky, použil pro sledování povodní quadrokoptéru s malou sportovní kamerou.
Zatímco vrtulník vydrží ve vzduchu 3 hodiny, quadrokoptéra vydrží na jednu baterii jen 10 minut, ale dostane se tam, kam se pilotovaný stroj nedostane, například nad areál chemičky.
Není zcela běžné poslat stroj za desítky tisíc nad vodní hladinu, ale podle autora J. Petra je nyní důležitá pomoc a lidské osudy. Podle slov spoluobčanů postižených povodněmi, jejichž nemovistosti natáčel, by tak mohla snáze přijít pomoc.
Zdroj: Události ČT
The question of reliability and at the same time quality of security systems is the most important criterion for selecting a particular type of security. The most dangerous from this point of view are perimeter systems that virtually in all modifications and technologies are greatly subject to the influence of external conditions and distractions. Due to this fact many false alarms quite often prevents their actual use (at least in civilian areas). This is why we (in the Laboratory of security systems Faculty of Engineering CZU) were searching for a way how to increase the efficiency of employment of the discussed perimeter systems. We wanted to enable problem-free utilization in the commercial area at a moderate price if possible. The solving of the problem by way of minimizing false alarms failed when changed to a different physical principle of detectors. Therefore we chose a different approach – we made a perimeter system with movable and automatic alarm verification.